4.10.4 G15/G16:直角座標/極座標
格式:
G15:以直角座標規劃程式
G16:以極座標規劃程式
於軸向移動 G 指令中,要給目的地之各軸值,可以直角座標系或極座標系規劃之,分別由 G15、G16 指令設定。(開機預設為 G15 直角座標系,若要用極座標系,需輸入 G16 指令)。
G15:以直角座標規劃程式
G16:以極座標規劃程式
註. |
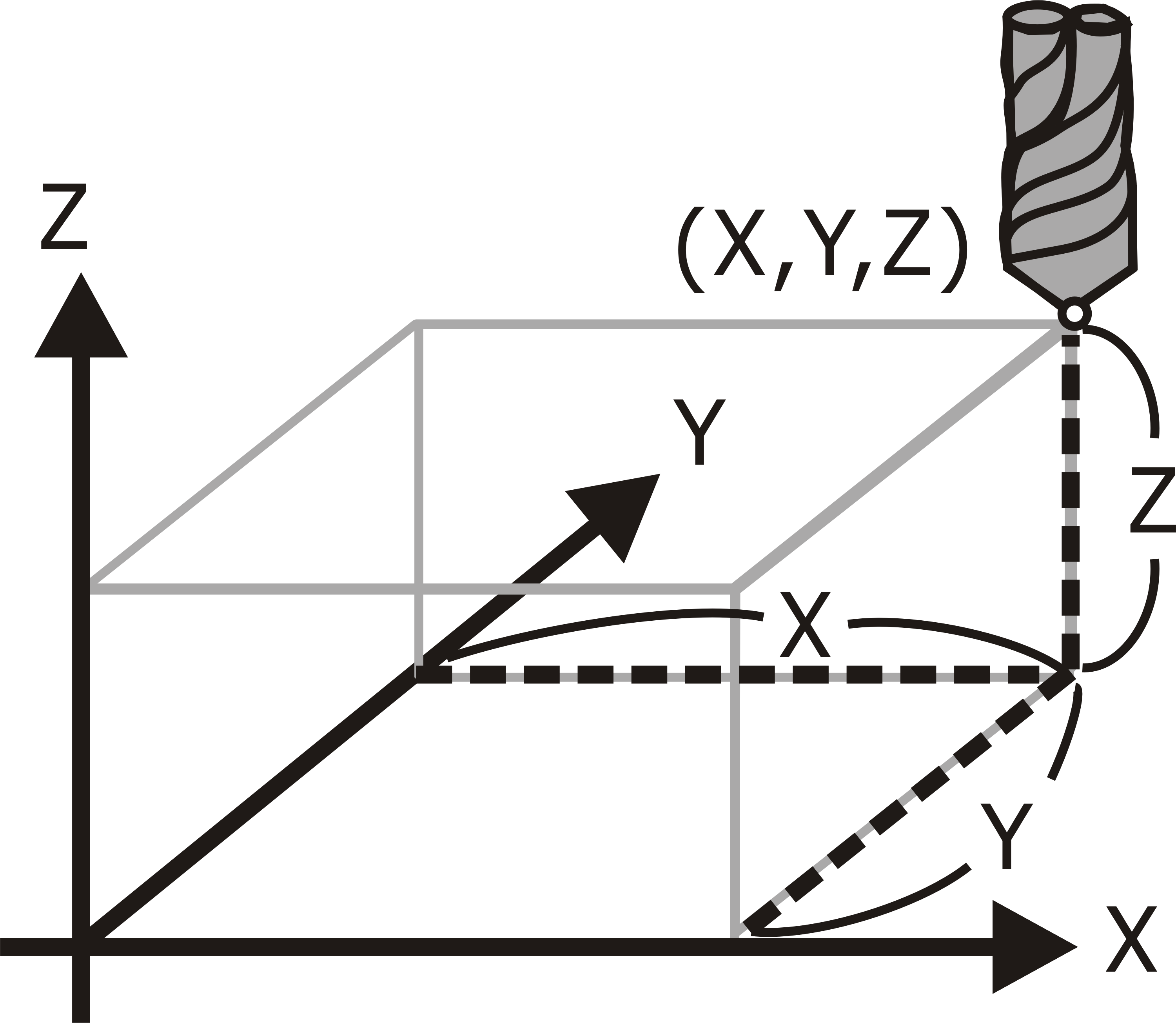
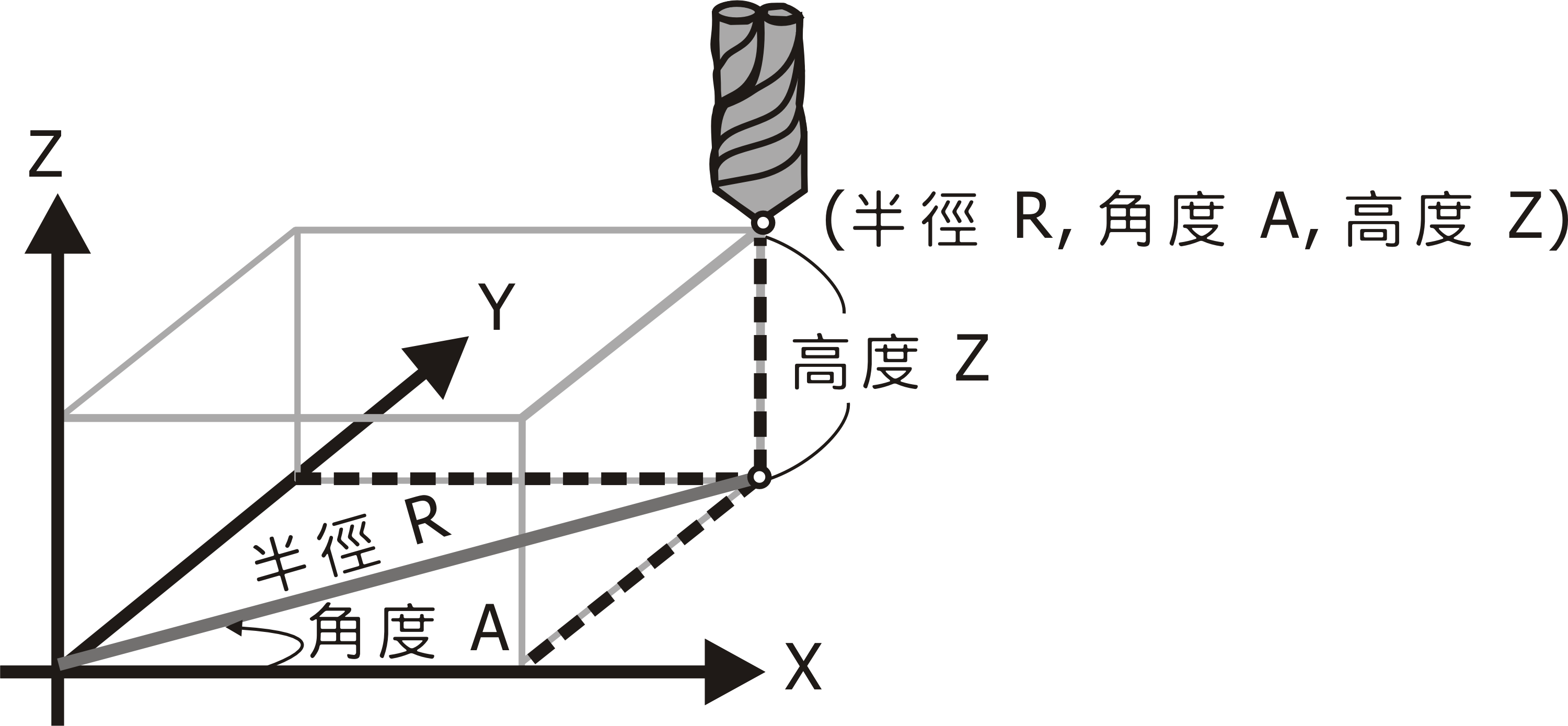
極座標與平面選擇有密切關連, 因此平面選擇(G17/G18/G19)必須先設定。極座標同樣以 X、Y 和 Z 為其位址代碼, 但此 X、Y 和 Z 值對應於極座標半徑、角度與高度之對應表如下表所示: |
G17 |
G18 |
G19 |
X=半徑 |
X=角度 |
X=高度 |
Y=角度 |
Y=高度 |
Y=半徑 |
Z=高度 |
Z=半徑 |
Z=角度 |
正角度值之定義,是由該平面第一軸逆時針方向的角度。(G17:由 X 軸轉向 Y 軸;G18:由 Z 軸轉向 X 軸;G19:由 Y 軸轉向 Z 軸)
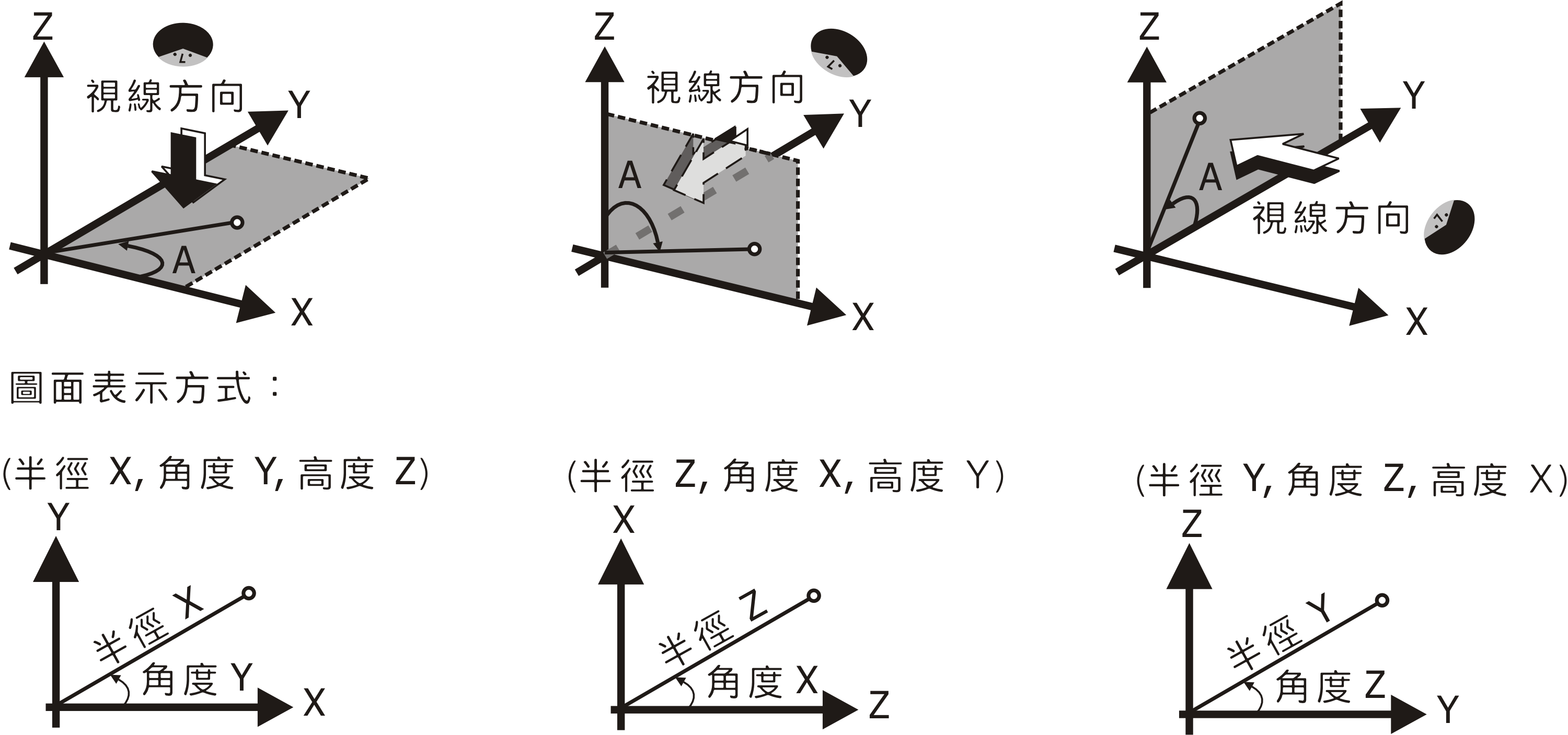
各平面選擇之極座標的正角度定義
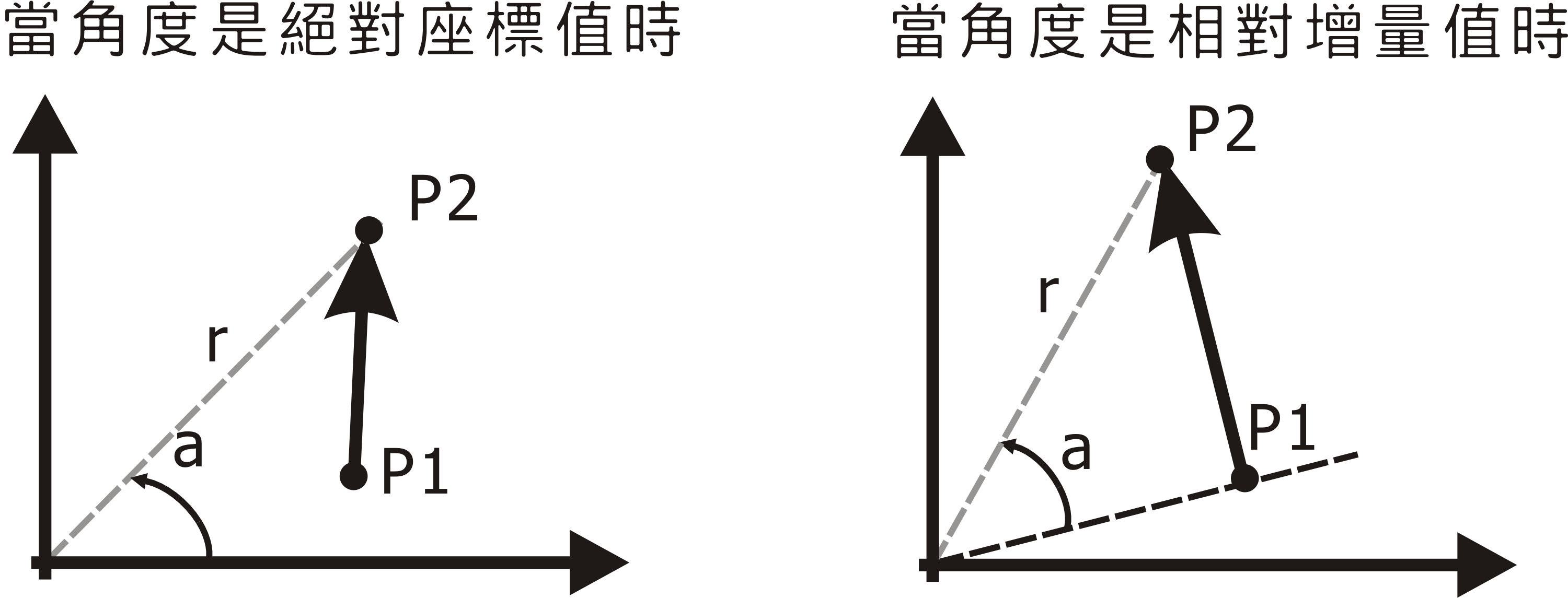
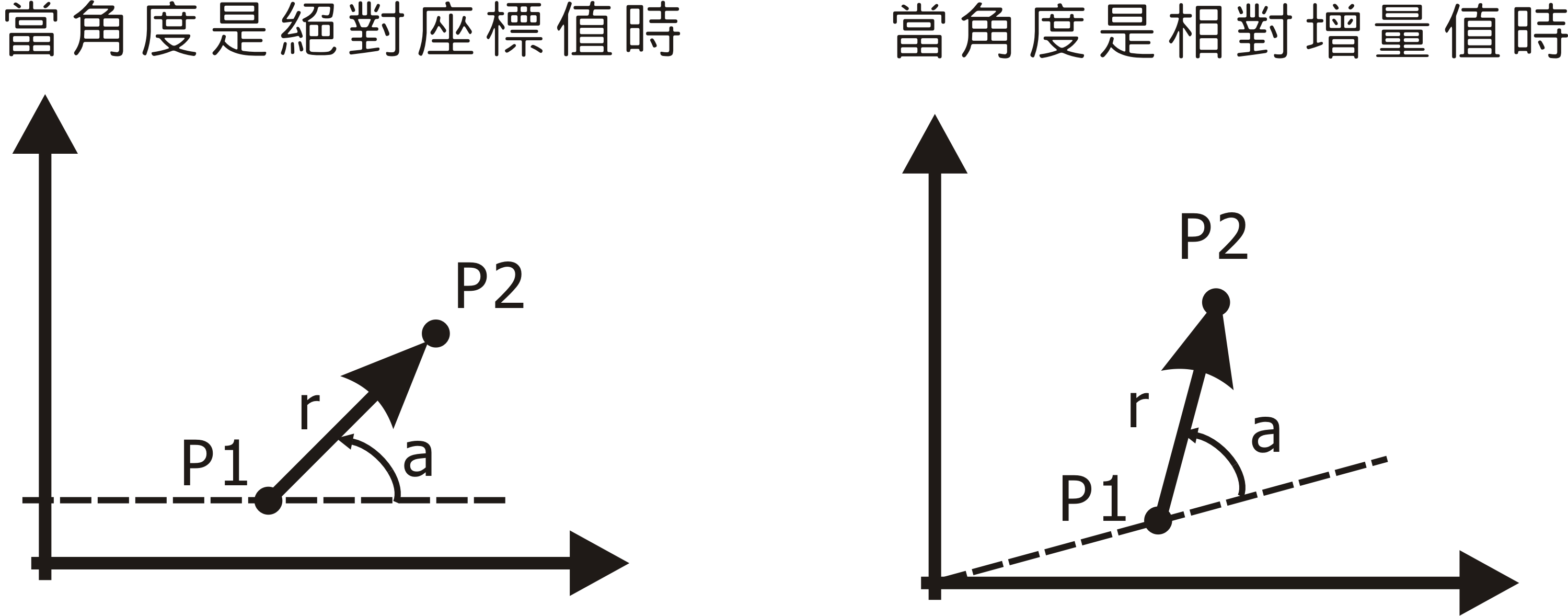
G90、G91 指令於極座標中仍有效用,亦即絕對座標或相對增量的半徑與角度。當剛轉換為極座標系時,半徑與角度分別在 G90/G91 中的定義有以下多種可能:
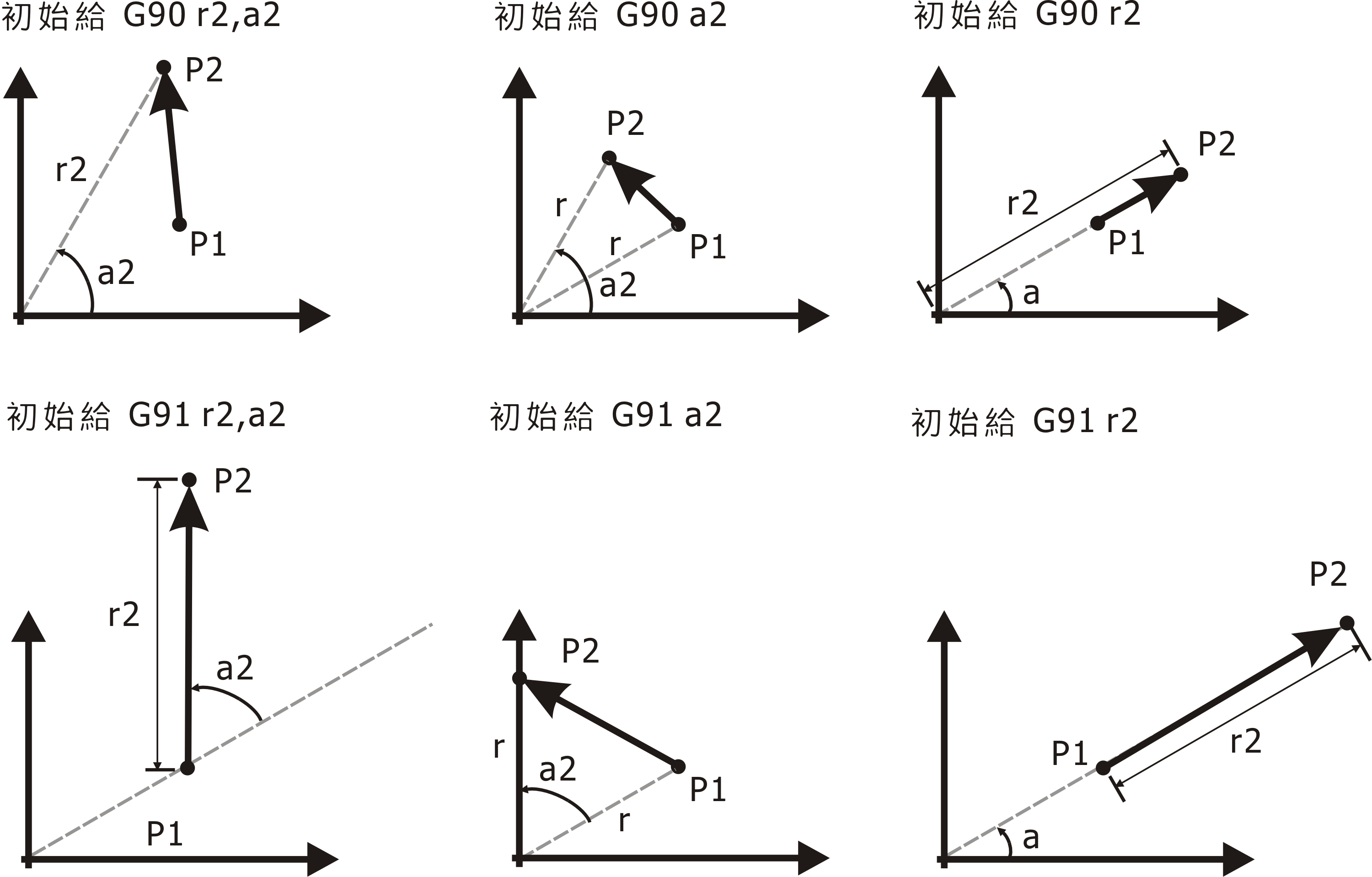
G15/G16 當剛轉換為極座標系時,半徑與角度分別在 G90/G91 中的定義有多種可能
註. |
當角度剛轉成相對增量值時,是以目前位置點 P1 所定義的角度為起始角度,然後再將相對增量角度加在其上;若目前位置點正落在原點上,則其起始角度等於零。 |
於極座標中半徑與角度可分別以 G90/G91 定義為絕對座標或相對增量值,如此所要偏移的目的地將因半徑或角度被設定為絕對座標或相對增量值之先後次序不同而異。玆歸納此類可能的組合如下:
1. 當半徑先被定義為絕對座標值時
G15/G16 當半徑先被定義為絕對座標值時,角度是相對增量及絕對座標值時的情形
2. 當半徑先被定義為相對增量值時
G15/G16 當半徑先被定義為相對增量座標值時,角度是相對增量及絕對座標值時的情形
以下列出半徑或角度被設定為絕對座標或相對增量值之先後次序不同時,而可能產生之其它各種組合:
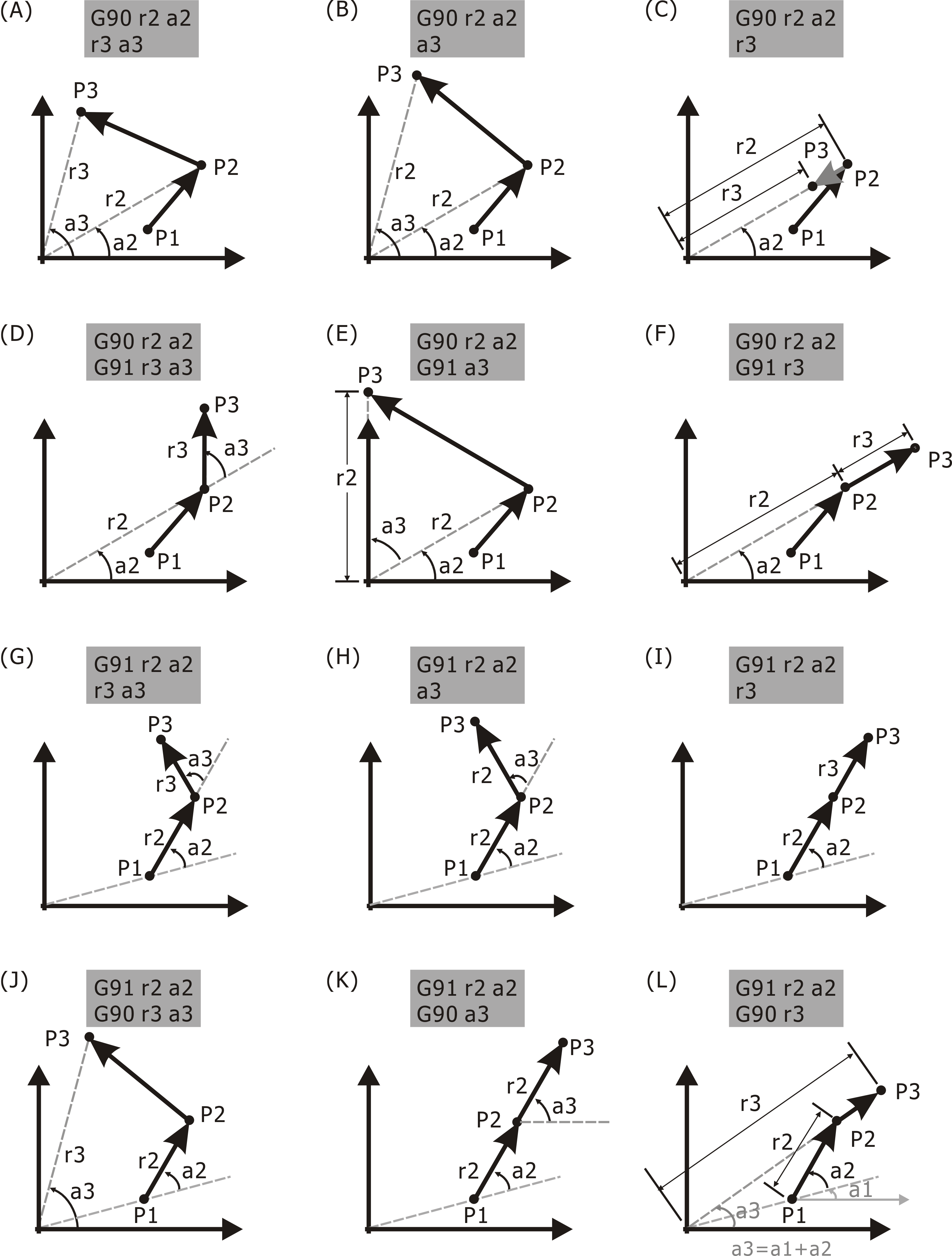
G15/G16 之各種組合
註. 若目前位置點 P1 正落在原點上,則 r1=a1=0。