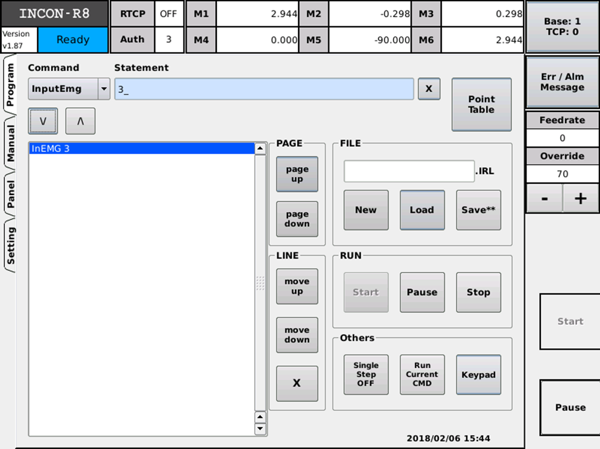
2 INCON-R8 座標系統系統與整合使用說明2.3 Robot Language 編程說明2.3.2 Robot Language 指令集 2.3.2.26 InputEmg 除了教導盒上的急停開關,此指令可設定任意 Input 點具有急停功能,輸入值為 Input 點的號碼,當該 Input 狀態變為 1 時,手臂會停止動作並將程式結束。