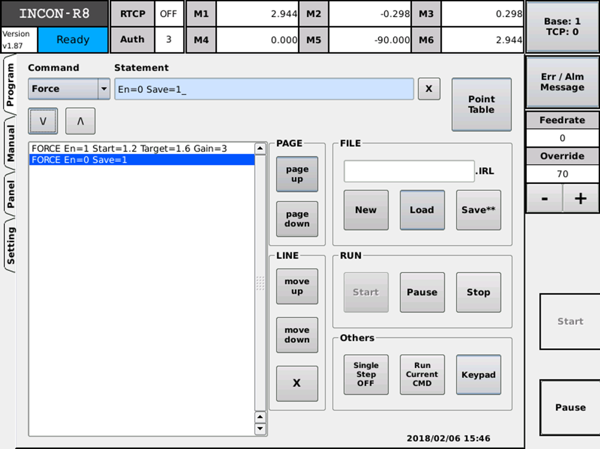
2 INCON-R8 座標系統系統與整合使用說明2.3 Robot Language 編程說明2.3.2 Robot Language 指令集 2.3.2.29 Force 此為啟閉力覺補償之命令,En = 1 時為開啟力覺功能,後續須設置 Start、Target 與 Gain,Start 代表下壓至此數值時才會開啟動態補償的功能,單位為牛頓;Target 代表補償的目標值,單位為牛頓;Gain 則是選擇力覺的設定頁中 1 到 3 其中一組的補償增益;En = 0 時為關閉力覺功能,後續須設置 Save,若 Save 為 1 時會將目前補償到的數值儲存至當前的 Base 偏移中。