2.3.1 編程流程
1. |
首先於 Command 選擇欲使用的指令,選擇後使用 Keypad 在 Statement 中輸入相關的數值,完畢後觸摸 V 按鈕後即可將目前命令放入並顯示於下方的 Robot Language 程序中,插入位置為目前被反白的 Robot Language 的下一行。 |
2. |
若要調整 Robot Language 的順序,可使用側邊的 PAGE/LINE 中的按鈕來協助修改。 |
3. |
若要修改已存在 Robot Language 中的命令行,可選擇該行再觸摸 Λ 按鈕,將該行複製到上方編輯區;重新編輯後再觸摸 V 按鈕將新的命令插入 Robot Language 中,並用 LINE 的 X 按鈕將原本的命令行刪除。 |
4. |
可預先規劃大概會用到多少點位,先完成 Robot Language 中各點與 IO 的動作方式與順序,待執行順序完成後再進入 Point Table 依照已編輯的 Robot Language 將點位教導進 Point Table 中。 |
5. |
編輯完畢後,可利用 Run Current CMD 再次檢查路徑,確認運動是否正確並判斷有無缺少點位的情形,檢查時可先調整 Override 成較小的比例。 |
6. |
確認程式無誤後,觸摸 Save** 儲存程式,待 Start 解除鎖定後,即可觸摸 Start 讓手臂執行此路徑程式。 |
7. |
若要直接執行已編輯完成在檔案中的程式,觸摸 Load 選擇欲執行的程式,再觸摸 Start 開始執行。 |
註. |
試跑程式時,應先確認是否已選擇正確的 Base 與 TCP,並選擇單步執行模式,待確定動作無誤後再解除。 |
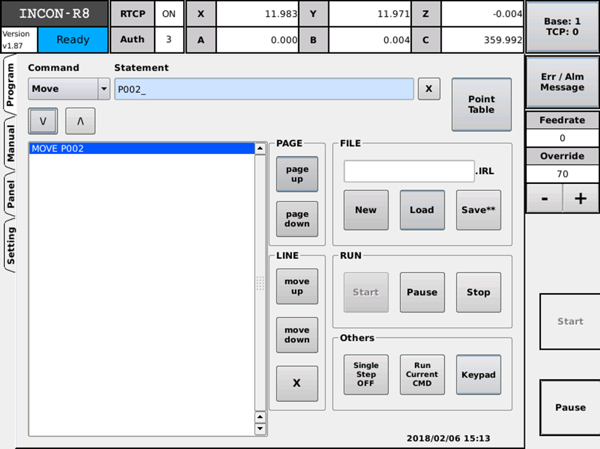
程式編輯子頁