2.3.3 Robot Language 範例程式
此處示範一個簡易的取放料程序,使用到的 IO 和 Macro 以及 Section 定義如下:
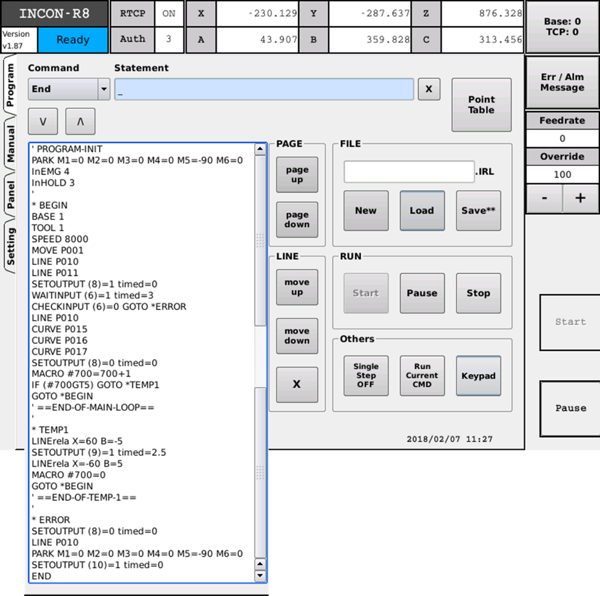
- Input 3:外部暫停輸入。
- Input 4:外部急停輸入。
- Input 6:夾爪夾取確認輸入。
- Output 8:夾爪夾取啟動輸出。
- Output 9:清潔夾爪吹氣輸出。
- Output 10:警示燈(或蜂鳴器)輸出。
- Macro 700:主程式取放計數。
- *BEGIN:主程式開頭;移動至取料點開啟夾爪,並等待夾取訊號,若夾取訊號在指定時間內未收到,即跳至 ERROR,如果確認夾取則移至放料點並鬆開夾爪,取放計數加一,若取放計數大於 5 次,則跳至 TEMP1,若否則回到 BEGIN 繼續執行下一次動作。
- *TEMP1:夾爪清潔程序;先移動至吹氣位置,開啟吹氣輸出並於指定時間後關閉,移開吹氣位置,將取放計數值歸零,再回到主程序 BEGIN 執行下一次動作。
- *ERROR:錯誤處理程序;將夾爪關閉,再依照安全之路徑把手臂退回安全區域,錯誤警示燈點亮,將程式停止。