5.1.4 五軸軸向定義位置
由 A 軸、B 軸、C 軸來定義旋轉軸,分別圍繞 X 軸、Y 軸、Z 軸轉動,轉動的正向可由右手定則來界定(如下圖所示)。通常機器的轉向機構可能帶動刀具,也可以帶動工件,因此其正、反向是由帶動結果之刀具的運動方向來定義。
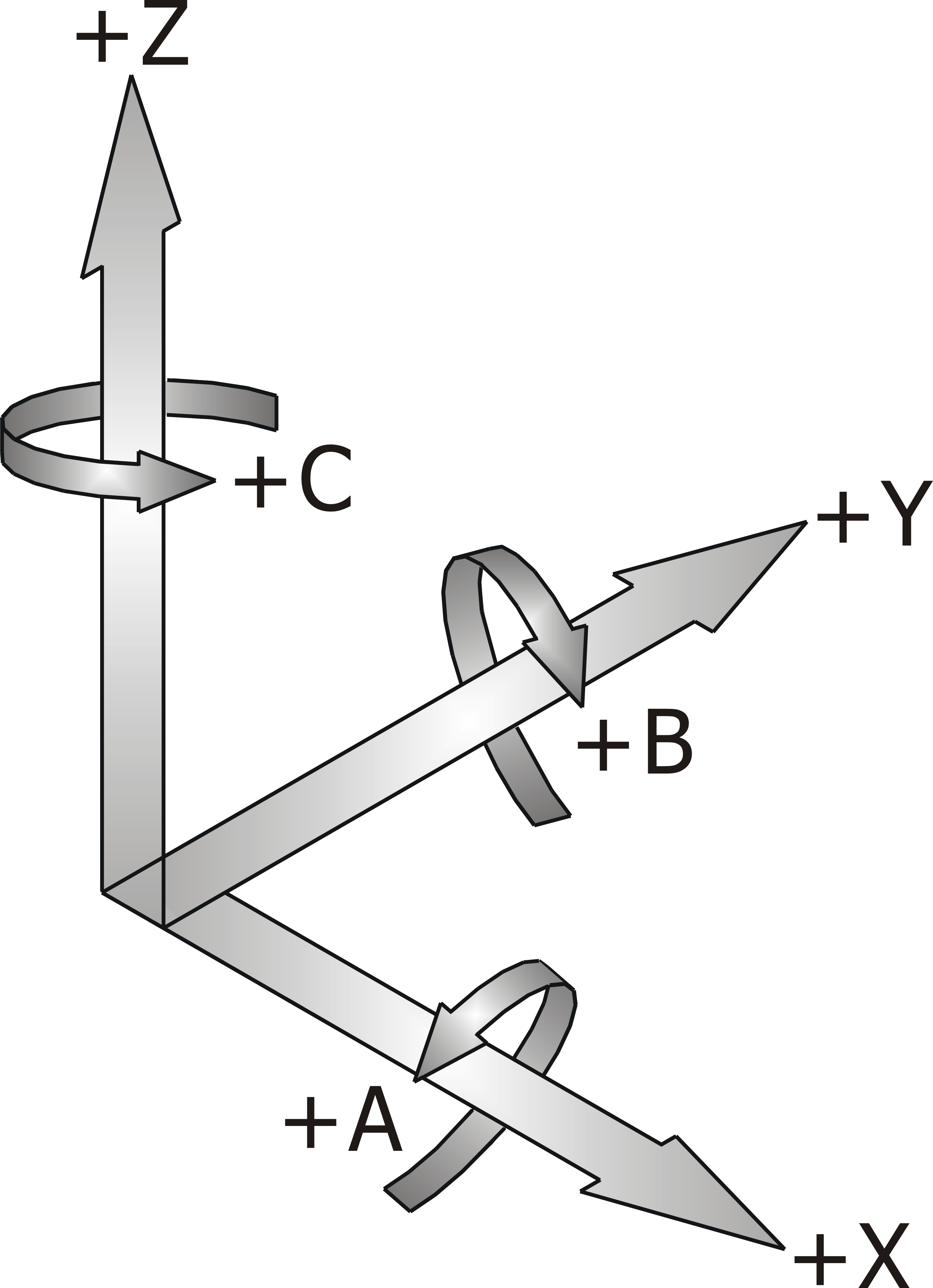
五軸軸向定義
在本手冊中,我們稱帶動機構的軸向機構為運動軸,而描述刀具的切削點與刀具方向是程式軸。INCON-M86R 可將五軸程式所定義的程式軸空間點,根據控制器內所設定的機構模型,將座標做實時轉換到運動軸空間來做加工(如下圖所示)。這個轉換我們通稱 RTCP 轉換(Real Time Rotating Center Point Transform)。
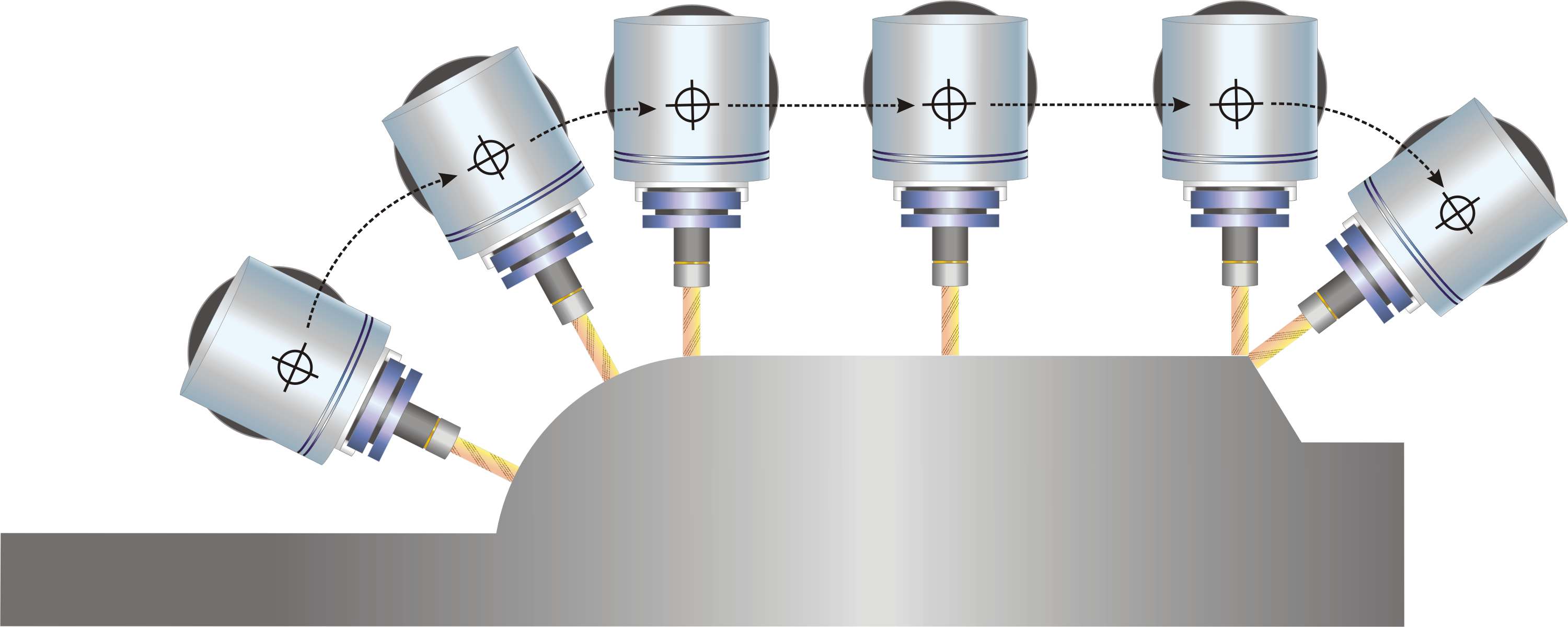
RTCP 轉換