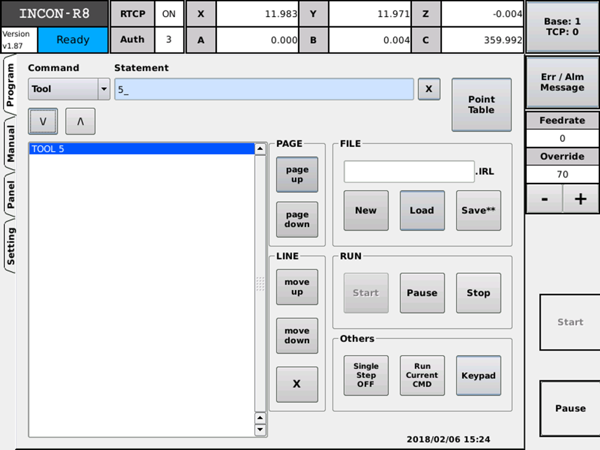
2 INCON-R8 座標系統系統與整合使用說明2.3 Robot Language 編程說明2.3.2 Robot Language 指令集 2.3.2.12 Tool 由於手臂更換之夾具、刀具等等之高低與方向皆不相同,因此會有相異的工具偏移量。系統提供6組偏移量的設定,此指令為用於選擇要使用工具偏移量的號碼,設為 0 時為不偏移,1 到 6 則對應到 TCP 表中的 6 組偏移值。