2.1 座標偏移設定
手臂末端的路徑一般是運行在編輯好或教導好的相同程式中,不論改變手臂的安裝方式或位置(橫向安裝或懸掛),或是被加工的工件移到不同位置擺放,或者是更換不同的工具,只要透過正確的座標偏移設定,在手臂的運動範圍內,手臂末端對工件都能走出相同的路徑,有關座標偏移設定將以下圖的配置為例,敘述各個座標系之間的關係。
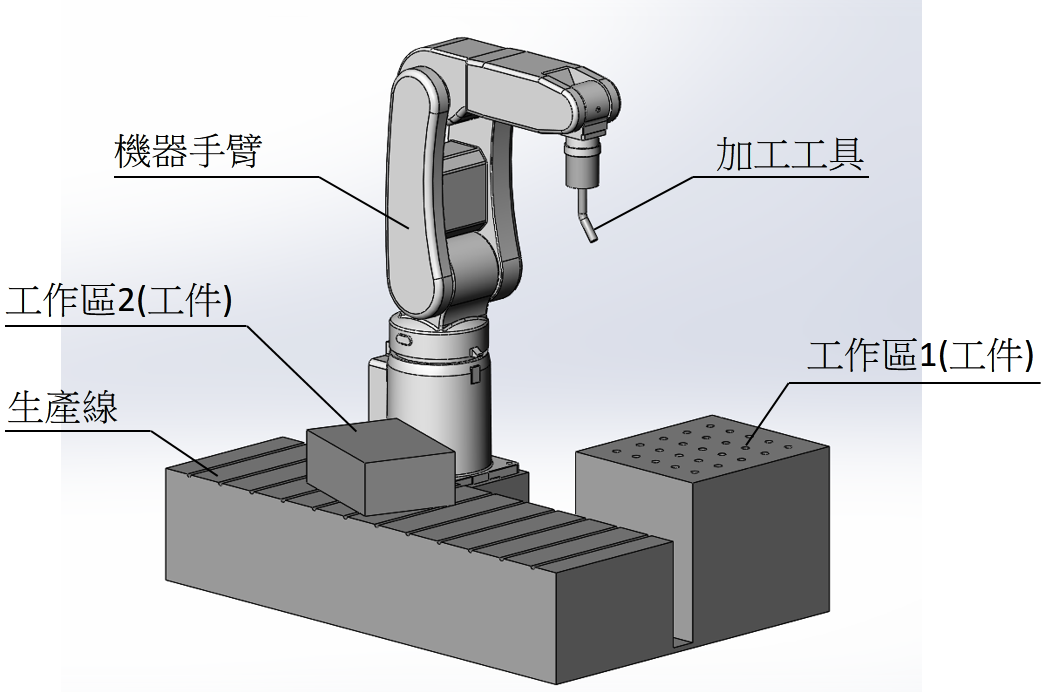
座標偏移設定範例示意圖
下圖表示的是範例配置的運動鏈,由使用者座標經過工件座標偏移可以得到工件座標;由使用者座標經過手臂安裝偏移可得手臂安裝座標,再經由運動空間的轉換將軸座標計算至使用者座標上可得手臂末端法蘭面的位置,最後經過工具座標偏移就可得到工具座標;而工具座標在工件座標系上的位置即為使用卡迪兒座標所描述的程式空間。
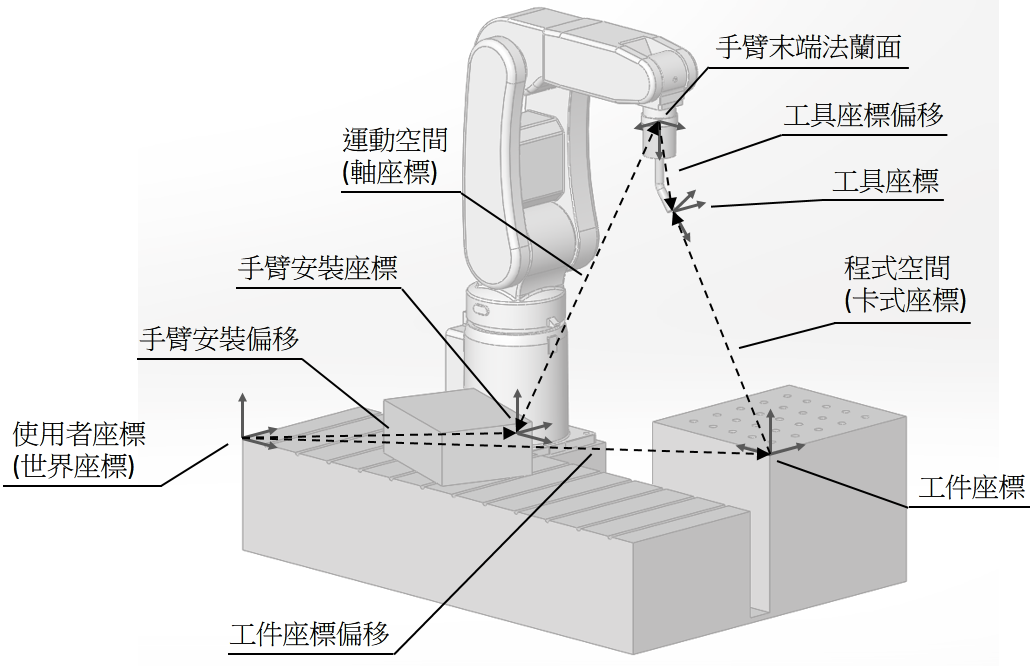
座標偏移之運動鏈