2.1.1 座標系平移與旋轉之定義
此章節使用座標系的平移與旋轉來敘述各座標系之間的關係,完整描述一座標偏移一共會有 6 個參數:X , Y , Z , I , J , K 。
X , Y , Z 描述的是座標系的平移,如下圖所示:新座標系(X' , Y' , Z')的原點在原座標系(X , Y , Z)上的位置,即為新座標系對原座標系的平移。
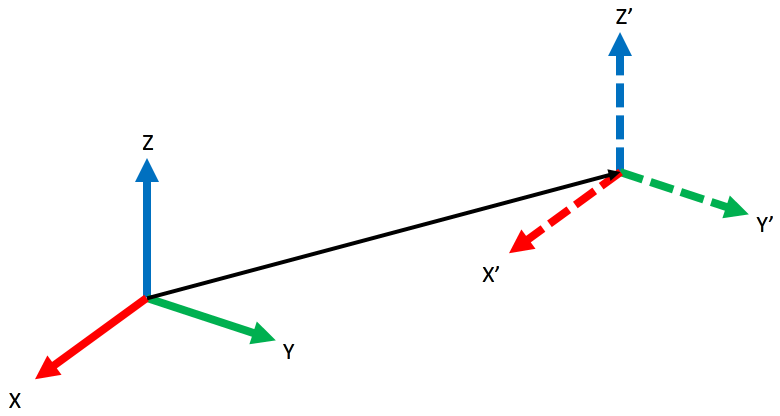
座標系平移
I,J,K 描述的是座標系的旋轉,旋轉的順序為 X - Y - Z,如下圖所示,第一步是將座標系(X , Y , Z)對 X 軸旋轉 I 角度,得到一個新的座標系(X' , Y' , Z');再來對 Y' 軸旋轉 J 角度,得到一個新的座標系(X'' , Y'' , Z'');最後對 Z'' 軸旋轉 K 角度,得到一個新的座標系(X''' , Y''' , Z''');也就是說將座標系(X , Y , Z)依 X -Y -Z 順序旋轉 I,J,K 角度後, 即可得到座標系(X''' , Y''' , Z''');I,J,K 會有多組解的狀況,但不會影響手臂動作的正確性。
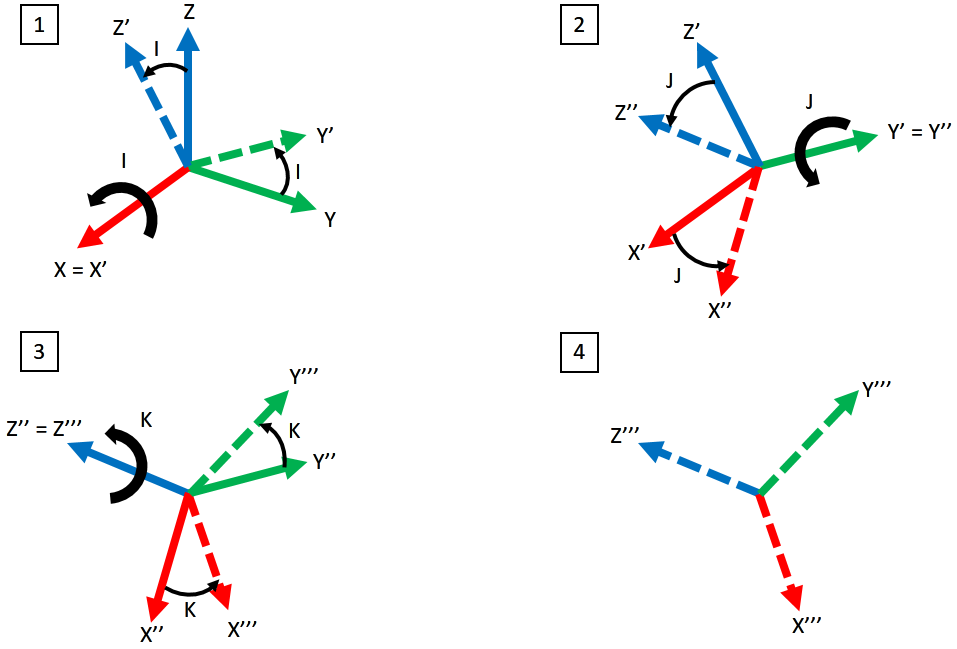
座標系旋轉