2.3.2.19 Inzone
此指令為對手臂末端點位置的判斷式,判斷式中以 P 的方式輸入兩個指定點位,控制器會判斷目前末端點是否是在此二點張成的六面體之中,判斷式成立時後續可接 Goto 或是 Then,Goto 可指定程式跳至特定 Section;Then 則可以操作 Macro 變數,範例如下:
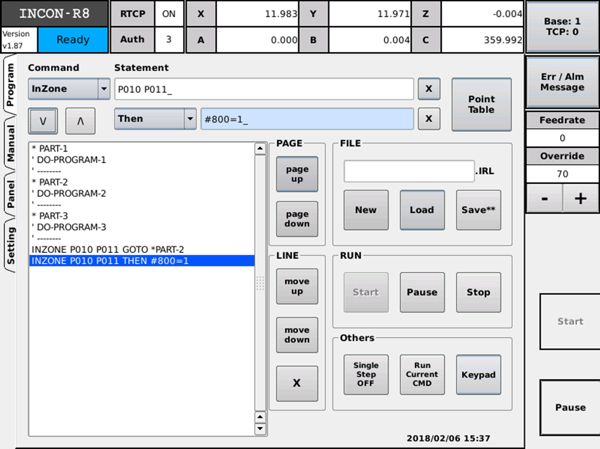
意義為若末端在 P010 和 P011 圍成的六面體中,則跳至 PART-2 執行,通常判斷的指定區域中可能是進行有方向性的工作,如組裝;而跳至的 Section 可能是要依照特定方向退出手臂的動作。