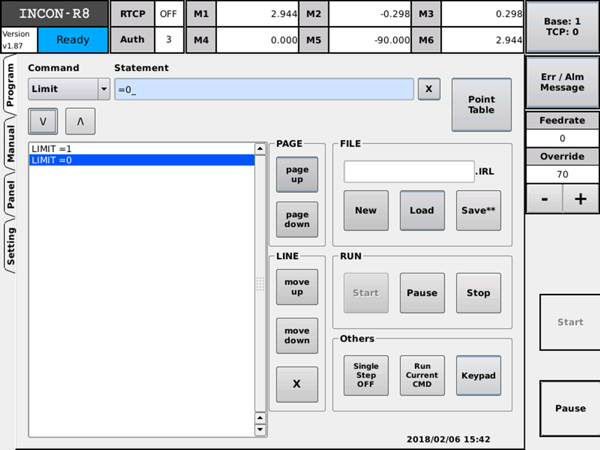
2 INCON-R8 座標系統系統與整合使用說明2.3 Robot Language 編程說明2.3.2 Robot Language 指令集 2.3.2.24 Limit 此指令可在程式執行時啟閉手臂末端點的軟體極限,設 1 是開啟,設 0 是關閉,軟體極限之範圍須先於 Setting 的 Limit 頁面中設定。