1.2.2.1 Program − 程式頁
此介面主要用來編輯與執行 Robot Language 之程式,如下圖,並將此畫頁分為 A~F 六個區塊來介紹。
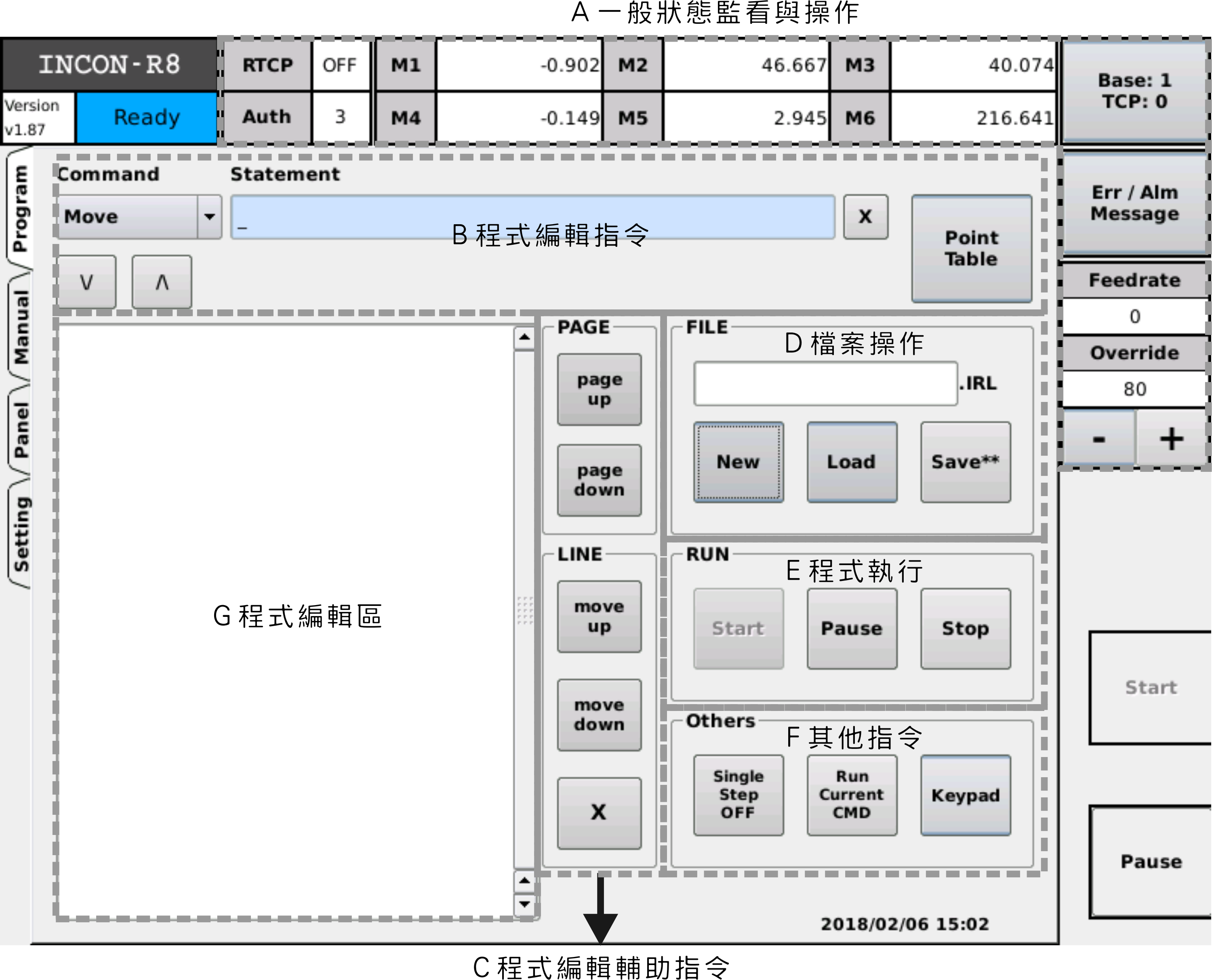
程式編輯介面
A. 一般狀態監看與操作
- RTCP 窗格:目前運動的座標空間,旋轉 ON 時表示在卡迪兒(Cartesian coordinate)座標中移動,以目前的 Base 設定值為基底,OFF 時則是在馬達的軸座標中移動。
- Auth 窗格:顯示目前的使用者權限等級。
- 座標窗格:依目前 RTCP 狀態改變顯示內容,若 RTCP 為 ON 時,顯示卡迪兒座標(X, Y, Z, A, B, C);若 RTCP 為 OFF 時,則顯示旋轉軸座標(M1, M2, M3, M4, M5, M6)。
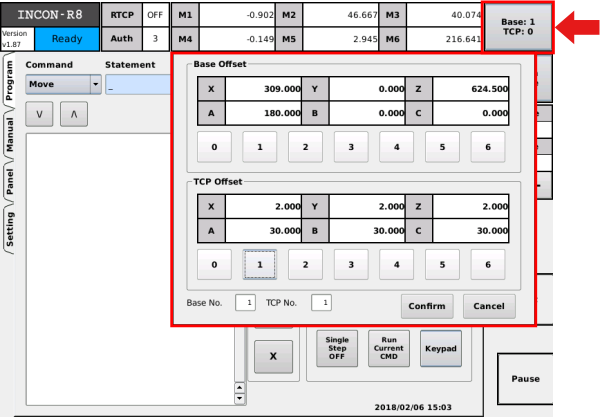
- Base/TCP 觸摸按鈕:按鈕上會顯示目前是選用第幾組 Base/TCP 偏移,若在非程式執行中觸摸此按鈕,則會開啟視窗如下圖,可以看到各組偏移的詳細數值,若要切換指定的偏移組數,選定後觸摸 Confirm 即可切換,提供使用者可以快速瀏覽和切換各組偏移。
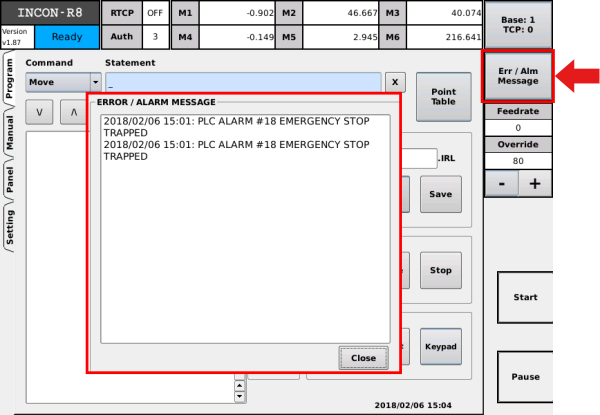
- Err/Alm Message 觸摸按鈕:觸摸後會顯示歷史錯誤訊息以及錯誤發生的時間,最多紀錄 32 筆,如下圖。
- Feedrate 窗格:目前的運行速度,單位:mm/min。
- Override 窗格:可調整手臂運行速度的百分比。
- Override+與-按鈕:調整 Override 比例,範圍為 0%~100%,每次可增減 10%。
B. 程式編輯指令
- Command:可展開下拉示選單選擇要用的 Robot Language。
- Statement:可於此行輸入對於目前 Command 之描述。
- X 觸摸按鈕:清除目前 Statement 中資料。
- V 觸摸按鈕:將目前的 Command 與 Statement 加入下方的 Robot Language 程序中。
- Λ 觸摸按鈕:將於 Robot Language 中選定的特定行複製至上方的 Command 與 Statement 中。
- Point Table 觸摸按鈕:可進入點位表,如下圖,每個程式最多可以記錄 1000 個點位,左上方的 Point No. 格中可以輸入 0~999 進行快速的索引;點選 Matrix 按鈕可以進入矩陣編輯頁,詳細會於 Robot Language 指令集中說明;點位可以直接用右方的數字鍵輸入,或者使用教點的方式,點位的資料以卡迪兒座標方式儲存,在輸入或教導時須注意是否與程式中所設定的 TCP 和 Base 相符,若該點位是以教導的方式紀錄時,表格的底色會顯示為藍色,若該點位經過數字鍵盤的編輯,表格底色則會顯示為原始的白灰色;若目前的 Command 為 Move 或 Line 等需要以點位描述之命令則可以選擇欲使用的點位後,按下 Add to Statement,即會將該點加入目前 Statement 中。
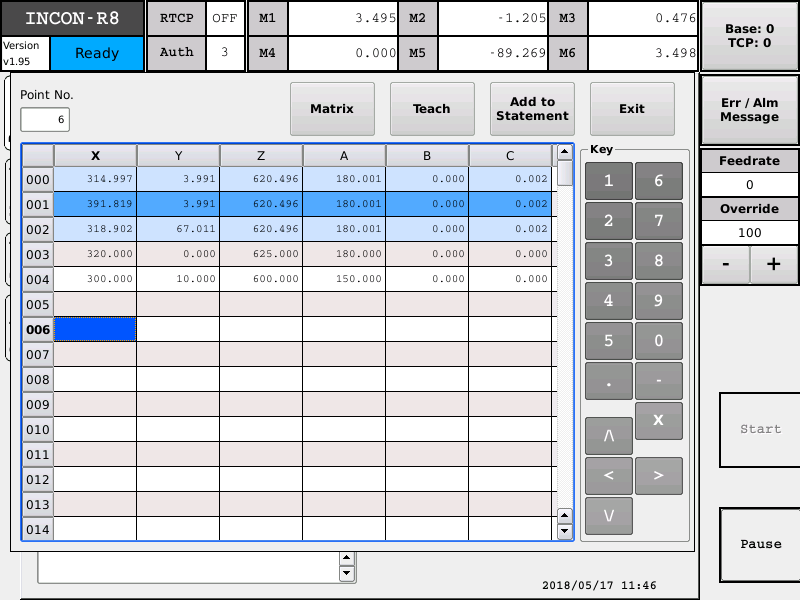
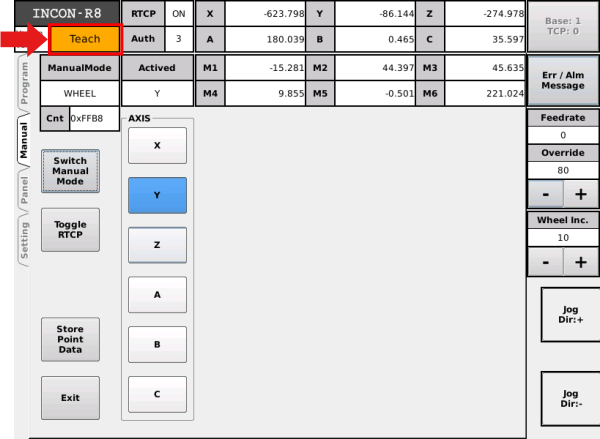
選擇指定點位再觸摸 Teach 之後則會進入教導模式,如下圖,操作方式與手動模式相同,不同處在於畫面左下方多出兩個觸摸按鈕以及畫面左上角的狀態會變為橘色以及顯示 Teach,移動到教導的位置後按下 Store Point Data,就會將目前的位置資訊紀錄至指定點位,Exit 則是不儲存並退出教導模式。
C. 程式編輯輔助指令
- page up 觸摸按鈕:Robot Language 向上翻頁。
- page down 觸摸按鈕:Robot Language 向下翻頁。
- move up 觸摸按鈕:將目前所選的 Robot Language 行往上移動一行。
- move down 觸摸按鈕:將目前所選的 Robot Language 行往下移動一行。
- X 觸摸按鈕:將目前所選的 Robot Language 行刪除。
D. 檔案操作
- New 觸摸按鈕:開啟新檔案,此時檔案名稱的位置會被清空。
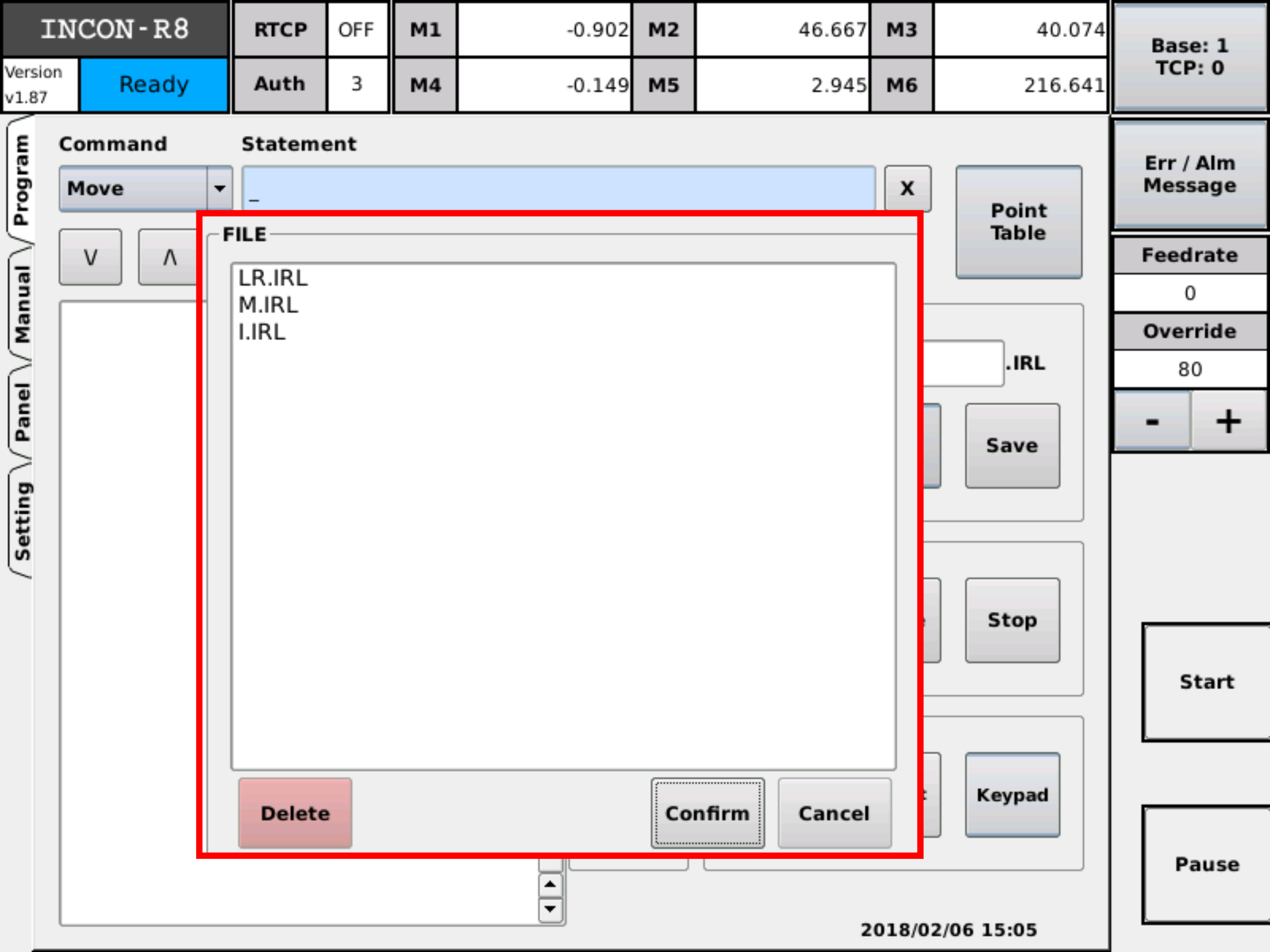
- Load 觸摸按鈕:載入目前控制器中所儲存的(Intek Robot Language)檔,觸摸後會彈出對話盒如下圖,選定檔案後觸摸 Confirm,會將 IRL 的資料放進 Robot Language 編輯區以及 Point Table 中,此時檔案名稱的位置會顯示為開啟之檔名;也可以在此對話盒選擇檔案並刪除。
- Save 觸摸按鈕:若有修改檔案內容此按鈕會顯示為 Save**,觸摸此鈕即會儲存;若為新檔案,必須先於檔案名稱行輸入欲命名之檔名才能儲存檔案。
E. 程式執行
- Start 觸摸按鈕:程式執行。
- Pause 觸摸按鈕:程式暫停。
- Stop 觸摸按鈕:程式停止。
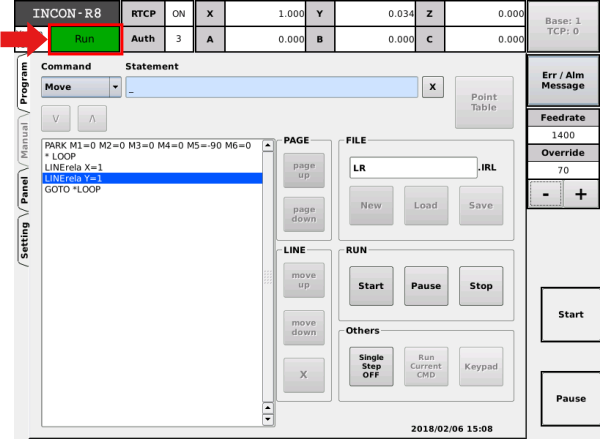
程式執行,畫頁左上角的狀態會變為綠色以及顯示 Run。
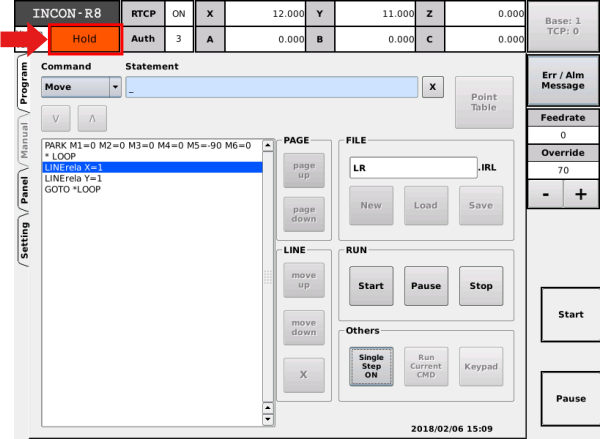
程式暫停時,畫頁左上角的狀態會變為紅色以及顯示 Hold,此時再按程式執行會從暫停處繼續執行;若是程式停止再按執行,則會從頭開始執行程式。
F. 其他指令
- Single Step 觸摸按鈕:於程式執行中,可以切換為單步模式,一次執行一行 Robot Language。
- Run Current CMD 觸摸按鈕:執行當前於編輯區的 Command 與 Statement,此按鈕只對運動相關的指令有效,如 Move、Park、Line 等,可以給使用者在正式執行程式前逐一檢查各個移動的點,確認運動是否正確並判斷有無缺少路徑點的情形,使用時必須注意目前的 Base/TCP 是否與程式中設置的相同。
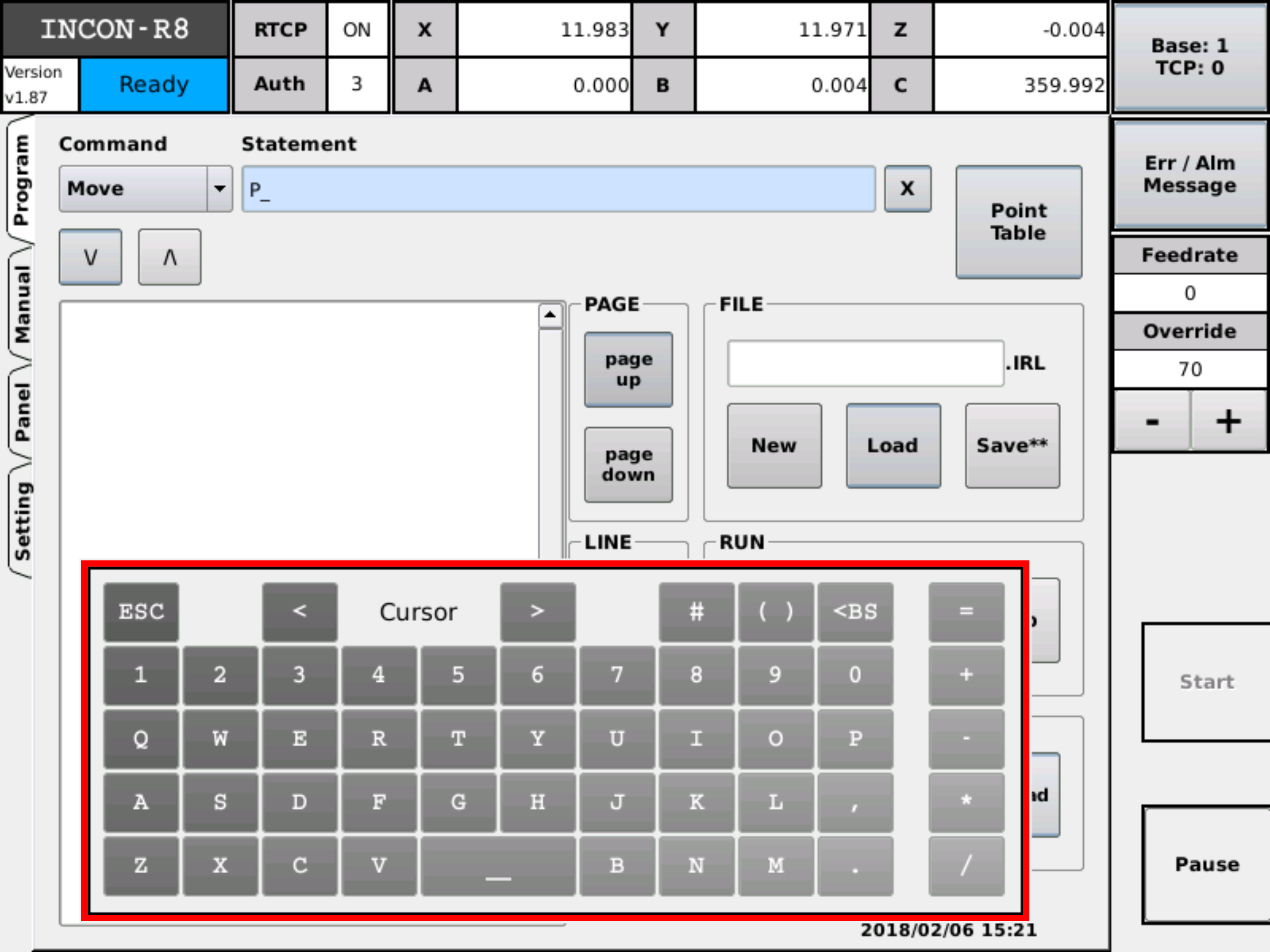
- Keypad 觸摸按鈕:顯示小鍵盤以輸入文字,目前鍵盤輸入的位置會顯示為淺藍色,如下圖 Statement 處,觸摸鍵盤左上的 ESC 鍵可關閉小鍵盤。
G. 程式編輯區
編輯此程式、載入程式之程式顯示操作區。