1.2.2.2 Manual − 手動頁
此頁為以手動方式移動機械手臂,手動模式時畫面左上角的狀態會變為黃色以及顯示 Manual,相關顯示與操作資訊如下所示。
- RTCP 窗格:目前運動的座標空間,ON 時手臂末端會在卡迪兒座標中移動,以目前的 Base 設定值為基底,OFF 時則是移動馬達的旋轉軸座標。
- 座標窗格:上方窗格會依目前 RTCP 狀態改變顯示內容,若 RTCP 為 ON 時,顯示卡迪兒座標(X, Y, Z, A, B, C);若 RTCP 為 OFF 時,則顯示旋轉軸座標(M1, M2, M3, M4, M5, M6),下方窗格則固定顯示旋轉軸座標值。
- ManualMode 窗格:目前的手動操作模式,JOG 為寸動,寸動模式可使用右下的觸摸按鈕往選定的軸向正或負移動;WHEEL 為手輪,手輪模式為使用右邊的旋鈕操作,順時針旋轉時往正移動,反之則往負移動。
- Actived 窗格:目前選定的移動軸向。
- Feedrate 窗格:目前的運行速度,單位:mm/min。
- Override 窗格:可調整寸動速度的百分比。
- Wheel Inc. 窗格:目前手輪搖動一次的步幅,單位:μm。
- SwitchManualMode 觸摸按鈕:切換手動操作模式為寸動或手輪。
- ToggleRTCP 觸摸按鈕:切換 RTCP 狀態。
- AXIS 觸摸按鈕:選擇欲移動的軸向,被選定的軸向按鈕會變藍色(與 Actived 窗格內同)。
- Override+與-觸摸按鈕:調整 Override 比例,範圍為 0 %~120 %,依序可設定為 0、1、2、4、8、10、20、30、40、50、60、70、80、90、100、120。
- Wheel Inc.+與-觸摸按鈕:調整手輪單次搖動的步幅,可設為 1、10 或 100。
- Fixed Axis ON/OFF 觸摸按鈕:開關大地座標模式,大地座標與一般開啟 RTCP 時的差異在於,若 RTCP 為 ON,大地座標為 OFF,(X, Y, Z)是以目前的 Base 座標為基底移動,(A, B, C)則是在目前 TCP 相對於 Base 的 X-Y-Z 尤拉角上轉動;若大地座標為 ON 時,(X, Y, Z)是以使用者座標為基底移動,(A, B, C)則是對固定的使用者座標軸做旋轉。
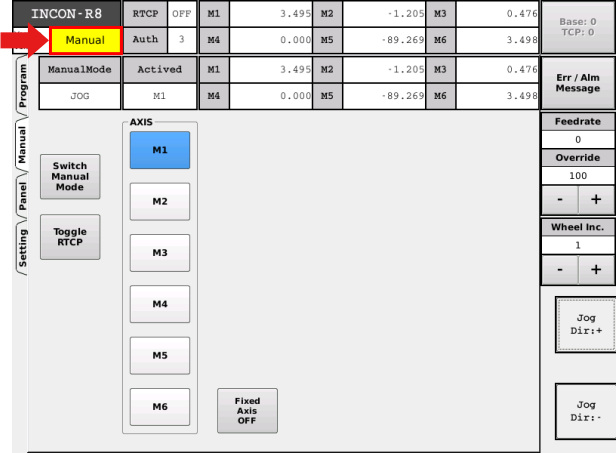
手動頁
如有選配力感測器,欲使用拖曳手臂方式進行手動操作,此時需先將切換為 RTCP 為 ON 與 JOG 模式,再開啟 Force Sensor On。