4.1.1.3 VTO
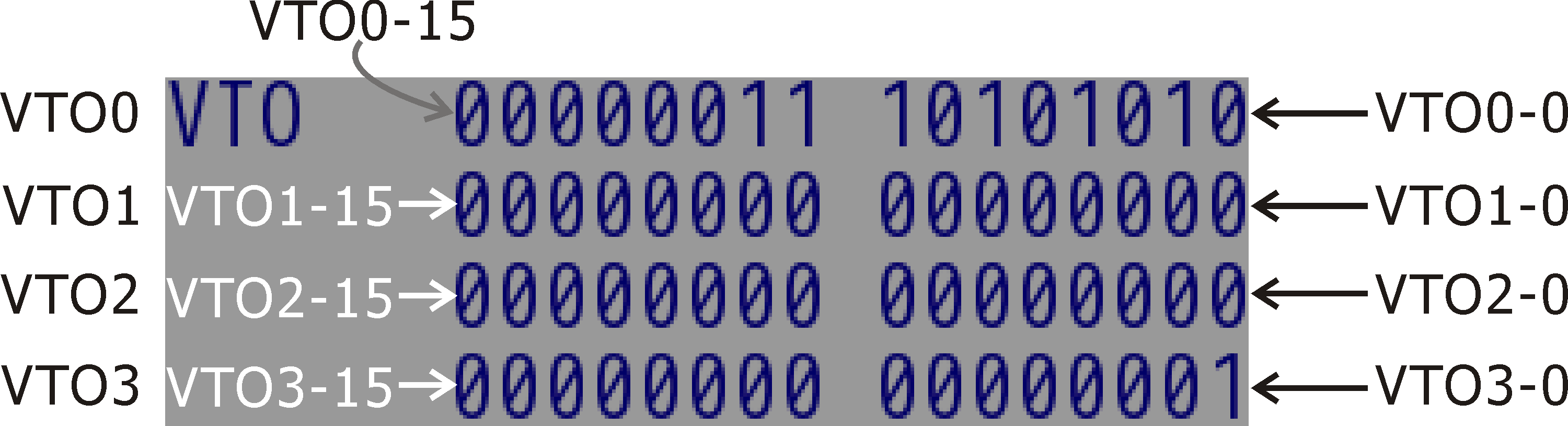
VTO 為虛擬輸出點,即 NC 和 PLC 間溝通橋樑。GDI(PLC 的外部輸入)、GDO(PLC 的輸出)、SPI 均可以是 VTO 輸出,VTO 輸出點因 PLC 功能增加而增加。每一組 VTO 皆由 16 bit 組成,左側的 [ 0 ]~[ 4 ] 代表 VTO0、VTO1、VTO2、VTO3、VTO4。
VTO 的畫面
下面的表格說明系統偵測畫面 VTO 如何對應到 PLC_VTO.H 的每一個 VTO bit 及定義,每一個 VTO bit 詳細的說明請參閱 INCON-M84/M86/M86R PLC 編程說明。
VTO |
對應到的 VTO bit |
定義 |
[0].0 |
plc.vto0.bit.fvov0 |
進給速率超馳調整百分比 bit 0 |
[0].1 |
plc.vto0.bit.fvov1 |
進給速率超馳調整百分比 bit 1 |
[0].2 |
plc.vto0.bit.fvov2 |
進給速率超馳調整百分比 bit 2 |
[0].3 |
plc.vto0.bit.fvov3 |
進給速率超馳調整百分比 bit 3 |
[0].4 |
plc.vto0.bit.jgov0 |
寸動速率超馳調整百分比 bit 0 |
[0].5 |
plc.vto0.bit.jgov1 |
寸動速率超馳調整百分比 bit 1 |
[0].6 |
plc.vto0.bit.jgov2 |
寸動速率超馳調整百分比 bit 2 |
[0].7 |
plc.vto0.bit.jgov3 |
寸動速率超馳調整百分比 bit 3 |
[0].8 |
plc.vto0.bit.G0ov0 |
G00 速率超馳調整百分比 bit 0 |
[0].9 |
plc.vto0.bit.G0ov1 |
G00 速率超馳調整百分比 bit 1 |
[0].A |
plc.vto0.bit.clsrt |
程式啟動 |
[0].B |
plc.vto0.bit.fhold |
程式暫停 |
[0].C |
plc.vto0.bit.emgsp |
緊急停止 |
[0].D |
plc.vto0.bit.probe |
量刀訊號輸入 |
[0].E |
plc.vto0.bit.iwst0 |
單動/手輪 步幅選擇 bit 0 |
[0].F |
plc.vto0.bit.iwst1 |
單動/手輪 步幅選擇 bit 1 |
VTO |
對應到的 VTO bit |
定義 |
[1].0 |
plc.vto1.bit.xhome |
X 軸外部歸零輸入 |
[1].1 |
plc.vto1.bit.yhome |
Y 軸外部歸零輸入 |
[1].2 |
plc.vto1.bit.zhome |
Z 軸外部歸零輸入 |
[1].3 |
plc.vto1.bit.ahome |
A 軸外部歸零輸入 |
[1].4 |
plc.vto1.bit.wlAx0 |
手輪軸向選擇 bit 0 |
[1].5 |
plc.vto1.bit.wlAx1 |
手輪軸向選擇 bit 1 |
[1].6 |
plc.vto1.bit.mMod0 |
手動模式選擇 bit 0 |
[1].7 |
plc.vto1.bit.mMod1 |
手動模式選擇 bit 1 |
[1].8 |
plc.vto1.bit.xovtr |
X 軸過行程 |
[1].9 |
plc.vto1.bit.yovtr |
Y 軸過行程 |
[1].A |
plc.vto1.bit.zovtr |
Z 軸過行程 |
[1].B |
plc.vto1.bit.aovtr |
A 軸過行程 |
[1].C |
plc.vto1.bit.wlOff |
手輪關閉 |
[1].D |
plc.vto1.bit.teach |
教導輸入 |
[1].E |
plc.vto1.bit.athom |
自動歸零 |
[1].F |
plc.vto1.bit.ptpgm |
程式編輯保護 |
VTO |
對應到的 VTO bit |
定義 |
[2].0 |
plc.vto2.bit.skp31 |
G31 輸入觸發 |
[2].1 |
plc.vto2.bit.jogsp |
由 PLC 指定寸動速度 |
[2].2 |
plc.vto2.bit.svpar |
儲存 PLC 參數 |
[2].3 |
plc.vto2.bit.nosft |
關閉軟體極限 |
[2].4 |
plc.vto2.bit.rgsiv |
剛性攻牙時主軸輸出電壓反向 |
[2].5 |
plc.vto2.bit.sstep |
PLC 副程式單步執行 |
[2].6 |
plc.vto2.bit.cprad |
計算半徑 |
[2].7 |
plc.vto2.bit.zcmpl |
Z 軸箝制禁止移動 |
[2].8 |
plc.vto2.bit.emgmv |
急停發生時移動軸向 |
[2].9 |
plc.vto2.bit.emvsp |
停止急停發生時移動中的軸向。 |
[2].A |
plc.vto2.bit.tlcmp |
寫入刀具補償表 |
[2].B |
plc.vto2.bit.wlax2 |
手輪軸向選擇 bit 2 |
[2].C |
plc.vto2.bit.bhome |
B 軸外部歸零輸入 |
[2].D |
plc.vto2.bit.chome |
C 軸外部歸零輸入 |
[2].E |
plc.vto2.bit.bovtr |
B 軸過行程 |
[2].F |
plc.vto2.bit.covtr |
C 軸過行程 |
VTO |
對應到的 VTO bit |
定義 |
[3].0 |
plc.vto3.bit.Vis4X |
控制器軟體版本為 4.xx 版以上 |
[3].1 |
plc.vto3.bit.HisVM |
控制器硬體為 VM 模組 |
[3].2 |
plc.vto3.bit.V4spc |
由控制器透過 plc.axisPmySindle.da 控制主軸電壓 |
[3].3 |
plc.vto3.bit.jogct |
由外部指定的輸入點取代預設的寸動輸入點 |
[3].4 |
plc.vto3.bit.HmOnc |
只做一次歸零程序,當系統已經歸過零, 再做歸零時直接移至機械零點 |
[3].5 |
plc.vto3.bit.lnG00 |
G00 線性定位 |
[3].6 |
plc.vto3.bit.ddmt0 |
同動軸選擇位元 0 |
[3].7 |
plc.vto3.bit.ddmt1 |
同動軸選擇位元 1 |
[3].8 |
plc.vto3.bit.alwmp |
每次進入機械參數都需要輸入密碼 |
[3].9 |
plc.vto3.bit.spdsp |
DNC 顯示 7 行,控制器畫面右下角同時顯示機械座標、程式座標、相對座標、剩餘距離資訊 |
[3].A |
plc.vto3.bit.swMan |
控制器切換到手動模式 |
[3].B |
plc.vto3.bit.whs1k |
手輪倍率 X1000 |
[3].C |
plc.vto3.bit.rgsda |
剛性攻牙時由 NC 控制主軸轉速 |
[3].D |
plc.vto3.bit.mstin |
系統保留 |
[3].E |
plc.vto3.bit.mstfi |
系統保留 |
[3].F |
plc.vto3.bit.stfov |
使用新的進給超馳處理方式 |
VTO |
對應到的 VTO bit |
定義 |
[4].0 |
plc.vto3.bit.zofnn |
檢查 G54~G59 Z 值不可為負 |
[4].1 |
plc.vto3.bit.toHDL |
伺服關閉時是否切換到手搖模式 |
[4].2 |
plc.vto3.bit.hdmpa |
隱藏部分機械參數(高速高精參數) |
[4].3 |
plc.vto3.bit.nedlg |
手動模式時是否顯示錯誤訊息對話盒 |
[4].4 |
plc.vto3.bit.ghov0 |
G00 16 段超馳模式速率超馳調整百分比 bit 0 |
[4].5 |
plc.vto3.bit.ghov1 |
G00 16 段超馳模式速率超馳調整百分比 bit 1 |
[4].6 |
plc.vto3.bit.ghov2 |
G00 16 段超馳模式速率超馳調整百分比 bit 2 |
[4].7 |
plc.vto3.bit.ghov3 |
G00 16 段超馳模式速率超馳調整百分比 bit 3 |
[4].8 |
plc.vto3.bit.ghovd |
選擇 G00 16 段式超馳模式 |
[4].9 |
plc.vto3.bit.pcent |
速度超馳使用 1% 為單位 |
[4].A |
plc.vto3.bit.sk31a |
G31 指令若超過指定距離未偵測到 SKIP 訊號,即會發出警告 |
[4].B |
plc.vto3.bit.g0hld |
程式執行至 G00 指令時會暫停 |
[4].C |
plc.vto3.bit.ngkyu |
系統不處理 GKYU 訊號 |
[4].D |
plc.vto3.bit.nextp |
控制器狀態視窗中的剩餘距離將變成顯示下一個單節的目標位置 |
[4].E |
plc.vto3.bit.adryn |
進階空跑功能 |
[4].F |
plc.vto3.bit.clsrd |
剛性攻牙主軸閉迴路控制 |