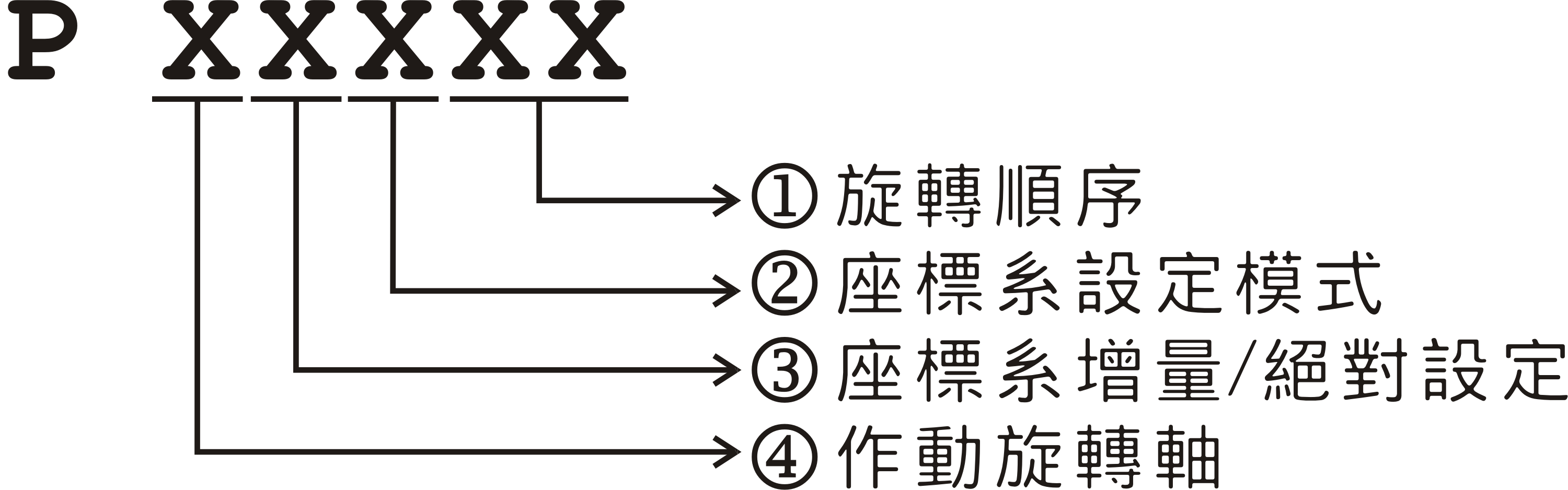
5.3.4 P XXXXX:指定座標系
X_ Y_ Z_ A_ B_ C_ U_ V_ W_:配合 P XXXXX 值之座標系設定值。
位數 |
設定功能 |
設定值 |
① |
旋轉順序 |
三個順序所形成之 10 進位數值 |
② |
座標系設定模式 |
0:不旋轉 1:ABC 值三次旋轉 2:直接角旋轉 3:法向量旋轉 4:投影角旋轉 |
③ |
座標系增量/絕對設定 |
0:絕對 1:增量 |
④ |
作動旋轉軸 |
0:不作動 1:作動 |
座標系的設定是由平移→旋轉→平移方式得到最終之座標系。
- X_ Y_ Z_:指定第一道之平移。
- A_ B_ C_:指定旋轉值,若非特別指定,單位為角度,旋轉方式是由 ② 旋轉模式指定,旋轉的順序是由 ① 旋轉順序指定。
- U_ V_ W_:指定旋轉後以新座標系再平移之值。