5.3.4.1 旋轉順序與座標系設定模式
旋轉模式共有以下 4 種:
0 |
: |
不旋轉,無效果。 |
1 |
: |
由旋轉順序指令做由 A_ B_ C_ 值所指定之角度值做三次旋轉。 |
2 |
: |
由直接角指定新座標系。 |
3 |
: |
由法向量指定新座標系。 |
4 |
: |
由投影角指定新座標系。 |
- 旋轉模式 1:由 A_ B_ C_ 值所指定之角度值做三次旋轉。
此旋轉模式依序指定三次旋轉,次序在後之旋轉是基於最後的座標系再旋轉。每一次的旋轉可繞 X 軸或 Y 軸或 Z 軸旋轉,因此可能有 81 種旋轉方式,但基於尤拉(Euler)旋轉定理,旋轉軸不重複方可定義任何旋轉,因此有 12 種旋轉可定義出任何旋轉。
此三次旋轉由旋轉順序指定,A 是第一,B 是第二,C 是第三。旋轉順序是二位數的 10 進位數,轉換成 2 進位數後,每兩位數指定一個旋轉方式。
XX XX XX
#3 #2 #1
每一組 2 進位數 XX:
00 不旋轉
01 繞 X 軸旋轉
10 繞 Y 軸旋轉
11 繞 Z 軸旋轉
#1 第一個旋轉,由 A_ 值指定。
#2 第二個旋轉,由 B_ 值指定。
#3 第三個旋轉,由 C_ 值指定。
例如:
先繞 X 軸再繞 Y 軸再繞 Z 軸為 2 進位 11 10 01 = 10 進位 57
先繞 Z 軸再繞 Y 軸再繞 X 軸為 2 進位 01 10 11 = 10 進位 27
先繞 X 軸再繞 Z 軸再繞 Y 軸為 2 進位 10 11 01 = 10 進位 45
先繞 Y 軸再繞 Z 軸再繞 X 軸為 2 進位 01 11 10 = 10 進位 30
先繞 Z 軸再繞 Y 軸再繞 Z 軸為 2 進位 11 10 11 = 10 進位 59
先繞 Z 軸再繞 X 軸再繞 Z 軸為 2 進位 11 01 11 = 10 進位 55
計算說明範例:以前述之先繞 X 軸再繞 Y 軸再繞 Z 軸為例,其 A_ B_ C_ 值為 11 10 01,則:
1 1 1 0 0 1
32 16 8 4 2 1
其數值計算方式為(32ϒƒ1)+(16ϒƒ1)+(8ϒƒ1)+(4ϒƒ0)+(2ϒƒ0)+(1ϒƒ1)= 57。
第二個旋轉是由第一個旋轉後之座標系為基礎之旋轉,第三個旋轉也是由第二個為基礎之旋轉。
例如:G158 L1 P10157 X2. Y0. Z10. A20 B20 C-30 U0 V10 W0 指定新座標系為先平移 X2 Y0 Z10,再繞 X 軸旋轉 20 度,再繞 Y 軸旋轉 20 度,再繞 Z 軸旋轉 -30 度,最後以旋轉後的座標系再平移 U、V、W 所指定之 X 方向 0、Y 方向 10、Z 方向 0。
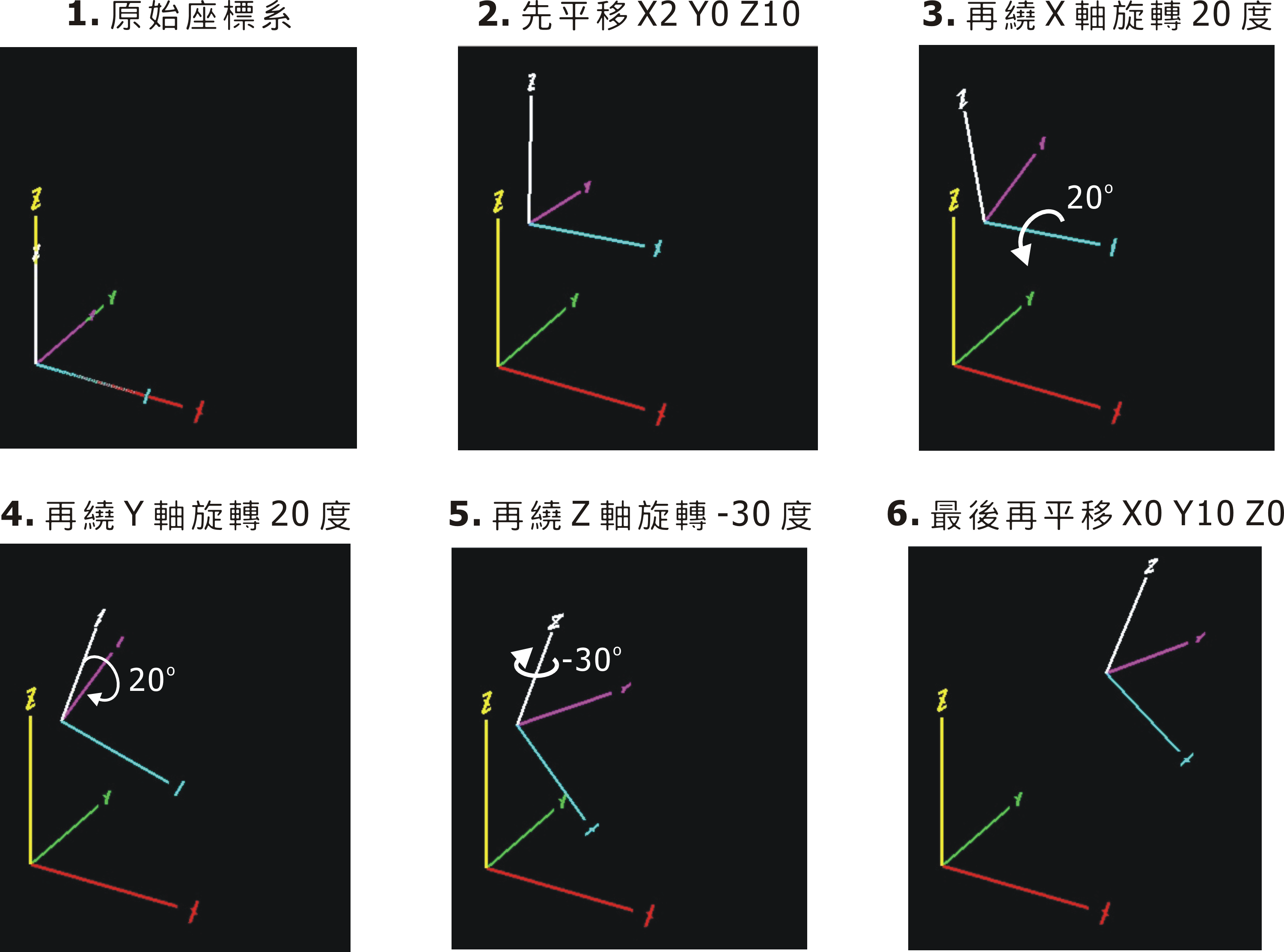
旋轉模式 1
- 旋轉模式 2:直接角指定。
由 A_ B_ C_ 值直接指定運動軸之角度,若是 AC 軸機構形式,則由 A_ 值與 C_ 值來指定,若是 BC 軸機構形式,則由 B_ 值與 C_ 值來指定。通常於此模式下,旋轉軸都會選擇要作動,作動後由主軸垂直於新座標系之 XY 平面。若需再旋轉 XY 平面,則需再加一行指令。範例如下:
G158 L3 P10200 X0 Y0 Z10 A0 B20 C45 U0 V0 W0
G158 L3 P01159 X0 Y0 Z0 A0 B0 C10 U0 V0 W0
;用增量再將 XY 平面轉 10 度
- 旋轉模式 3:法向量指定。
由 A_ B_ C_ 值形成一個向量,此向量即刀具之方向,亦為新座標系之法向量,此座標系若需再做一個 XY 平面之旋轉,可參考直接角指定範例做旋轉。
- 旋轉模式 4:投影角指定。
由 A_ 值指定新座標系之 XY 平面與正 X 軸所形成之投影角,B_ 值指定新 XY 平面與 Y 軸所形成之投影角,此時新座標系之 X 軸落在原座標系之 XZ 平面上(y = 0 之平面),此時 C_ 值指定最後之新 XY 平面再轉之角度值。範例如下:
範例一:
G158 P10400 X0 Y0 Z0. A20. B30. C0 U0 V0 W0
範例二:
G158 P10400 X0 Y0 Z0 A20. B30. C15. U0 V0 W0
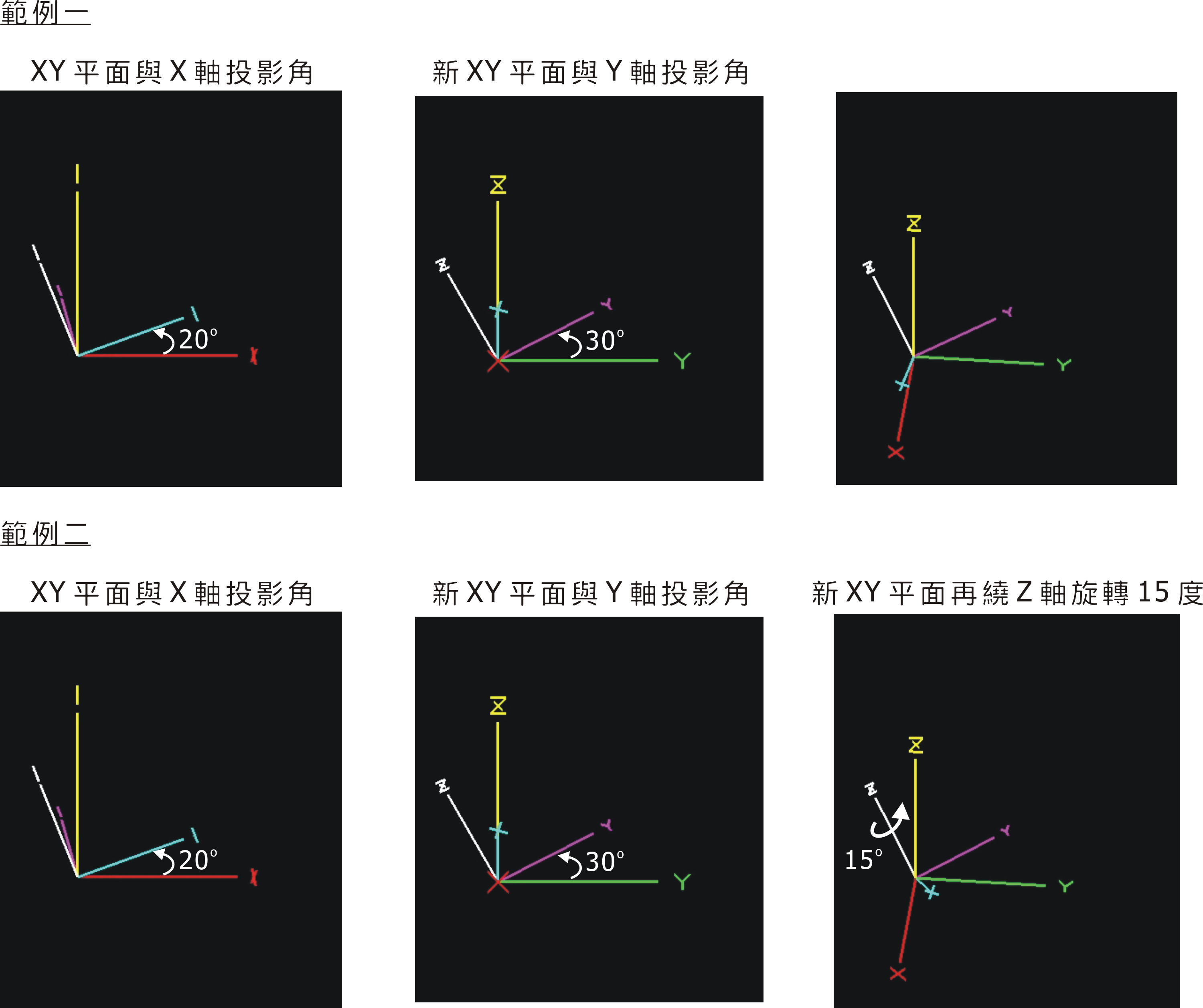
旋轉模式 4