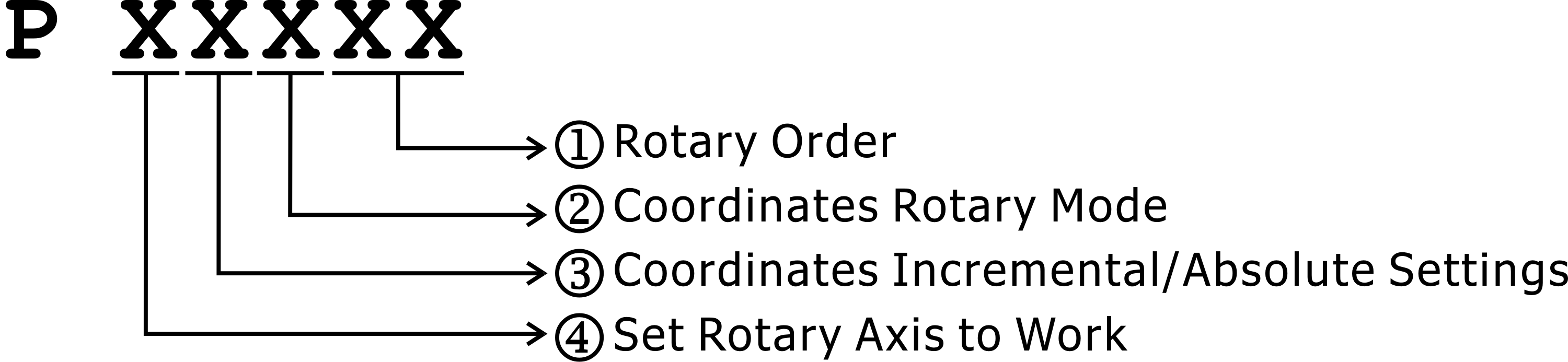
5.3.4 P XXXXX: Coordinates Designation
X_ Y_ Z_ A_ B_ C_ U_ V_ W_:Coordinate system setting value for P XXXXX.
Digit |
Function |
Value Description |
① |
Rotary order |
Three rotary orders |
② |
Coordinates rotary order |
0: no rotation 1: rotate three times by ABC values 2: rotate by given direct angles 3: rotate by given normal vectors 4: rotate by given projection angles |
③ |
Coordinates incremental/absolute settings |
0: absolute 1: incremental |
④ |
Activate rotary axis |
0: not activate 1: activate |
The coordinate system is set by translation → rotation → translation to obtain the final coordinate system.
- X_ Y_ Z_:Specify the first translation.
- A_ B_ C_:Specifies the rotation value. If not specified, the unit is the angle. The rotation mode is specified by the ② rotation mode, and the rotation sequence is specified by the ① rotation sequence.
- U_ V_ W_:Specifies the value to be translated in the new coordinate system after rotation.