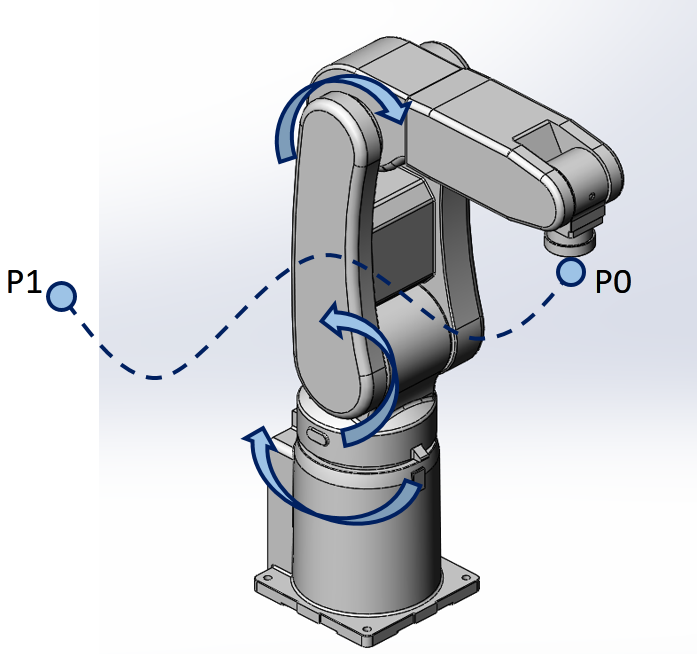
2 INCON-R8 座標系統系統與整合使用說明2.2 運動座標系 2.2.1 運動空間 在運動空間的運動模式下,可以獨立操作各個關節正向或反向運行至命令的角度,在運動空間移動時,指定的是關節角度,如下圖,整段路徑只有 P0 和 P1 是確定位置的,中間虛線處的路徑是無法預知的,因此此模式適用於不需考慮末端路徑且不發生干涉時,快速定位至指定位置的動作。