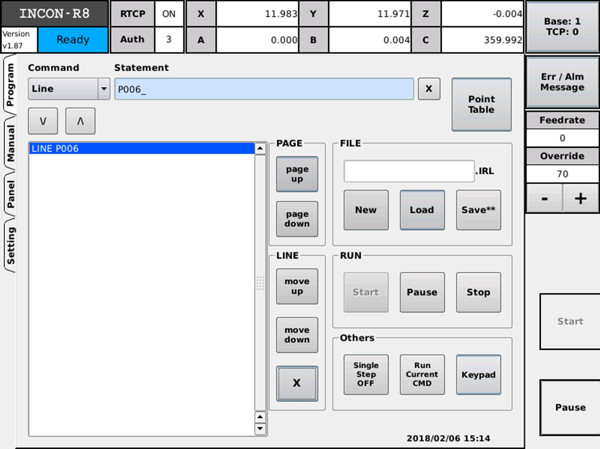
2 INCON-R8 座標系統系統與整合使用說明2.3 Robot Language 編程說明2.3.2 Robot Language 指令集 2.3.2.2 Line 此指令為點到點直線移動之功能,輸入的值為指定的點位、P,根據輸入路徑點之座標值手臂末端將會從目前位置移動至此座標,而此兩點間移動方式為直線運動。