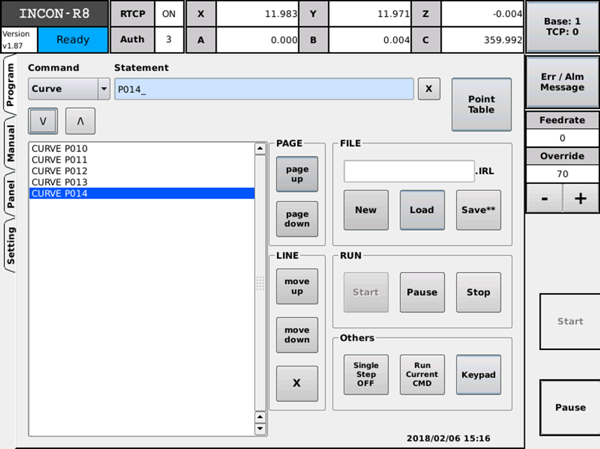
2 INCON-R8 座標系統系統與整合使用說明2.3 Robot Language 編程說明2.3.2 Robot Language 指令集 2.3.2.4 Curve 此指令可使手臂以曲線方式移動,輸入的值為指定的點位、P,此指令須連續使用,手臂末端會以平滑曲線的方式經過各個點位;若僅輸入一個路徑點,則手臂將呈現直線運動。