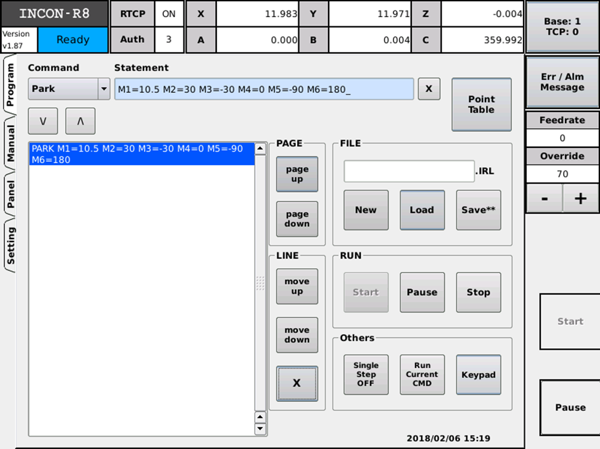
2 INCON-R8 座標系統系統與整合使用說明2.3 Robot Language 編程說明2.3.2 Robot Language 指令集 2.3.2.6 Park 此指令可使手臂移動到指定的軸座標位置,輸入的值為各個軸的指定角度(M1=、M2=、M3=、M4=、M5=、M6=)。