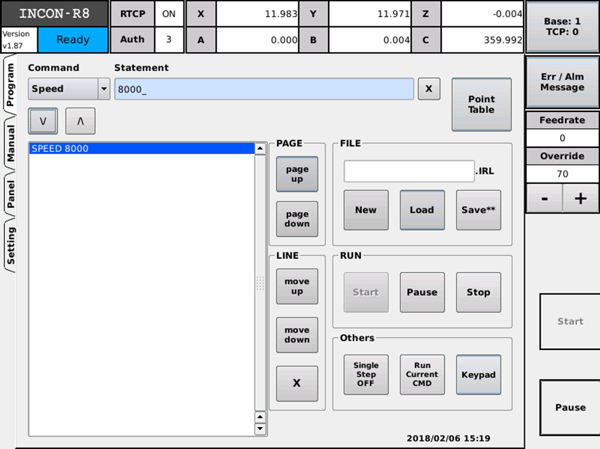
2 INCON-R8 座標系統系統與整合使用說明2.3 Robot Language 編程說明2.3.2 Robot Language 指令集 2.3.2.7 Speed 此指令為設定手臂末端在卡迪兒座標中的移動速度,輸入的值為正整數,單位為 mm/min。