3.2.6 編碼器解析度(單位:line/round)、進給導程 pitch(單位:μm/round)
INCON-M84/M86/M86R 必須知道位置迴授裝置的解析度,其單位為每轉的脈衝量。相對應於編碼器轉一圈時,機臺實際移動的直線距離為進給導程。
編碼器和光學尺都是位置迴授元件,編碼器通常都裝在馬達後端。編碼器在馬達轉動時完全與之同步(即馬達轉一圈,編碼器也轉一圈),編碼器此時會產生脈衝輸出。當馬達轉一圈且齒比是 1 : 1 情形下,進給系統會移動 1 個導程。控制器因此可以由編碼器輸出的脈衝數來計算移動距離。
例如:編碼器輸出非 4 倍頻為 5000 line/round,進給導程是 5000 μm/round,齒比是 1 : 1,在此條件下,控制器會在計數至 20000 脈衝時認定機械移動了 5000 μm。
此例參數設定為解碼器解析度 5000 及進給導程 5000,如果編碼器輸出為 4 倍頻 5000 line/round,參數要設 : 解碼器解析度為 1250 及進給導程 5000,控制器會在計數至 5000 脈衝時認定機械移動了 5000 μm。
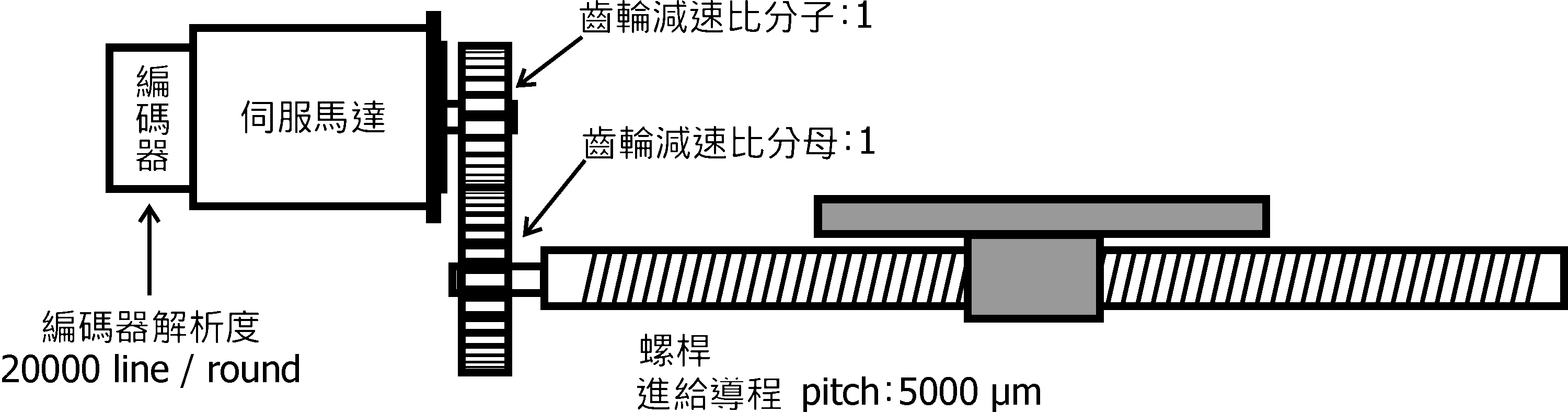
編碼器解析度
當光學尺裝在軸向上作為直接迴授元件時,光學尺依其規格產生 1 個脈衝當成移動 1 個單位位移量。例如 : 光學尺規格是 5 μm,表示每當 5 μm 移動時會產生 1 個脈衝。使用光學尺時,參數中的齒比要設為 1 : 1,若為其他齒比將會使光學尺失去效用。使用光學尺須計算虛擬編碼器的解析度。
例如 : 光學尺是 1 μm,假設導程是 5000 μm,5000 μm/1 μm/4 = 1250,因此軸向參數中編碼器解析度的設定值為 1250。
註. 計算式中的數值 "4" 是指 4 倍頻。