3.2.6 Encoder (Unit: line/round), Feed Pitch (Unit: μm/round)
INCON-M84/M86/M86R need to know the position encoder resolution. The unit is the of pulse count of per round. When the encoder for one round, the actual movement of the machine is known as feed pitch.
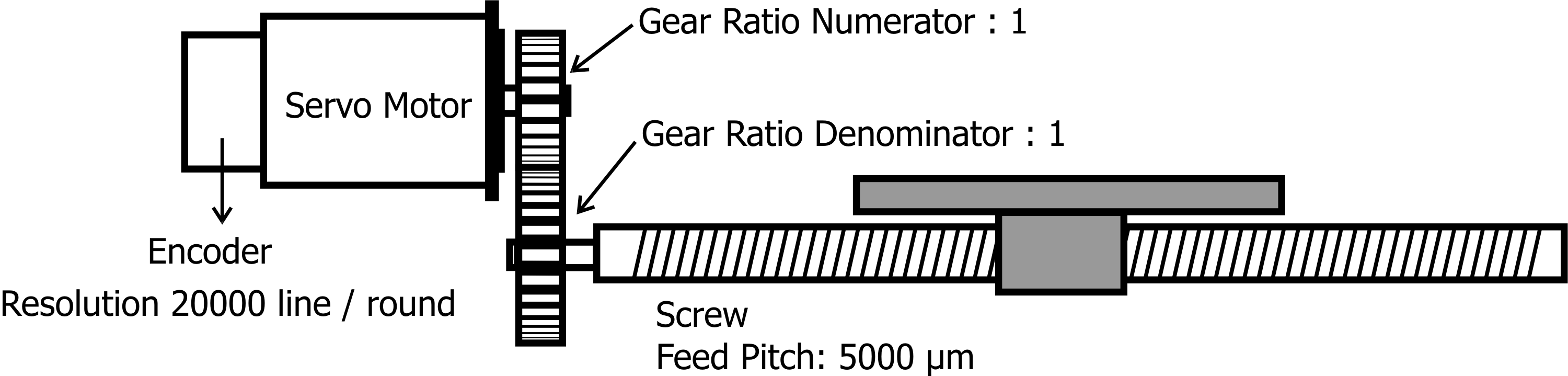
Encoder and optical scaler are both feedback elements, encoder are usually place behind motor. When motor finish moving, encoder have done the same (thus, if motor spin once, encoder also spin once), encoder will at this time create pulse output. When the motor spin once and the gear ratio is 1:1, the feed system would have done one feed pitch. CNC controller will through pulse of encoder to calculate the movement distance.
For example: If encoder output Non 4 times 5000 line/round, and the feed pitch is 5000 μm/round. Geer is 1:1, under the circumstances, the CNC Controller will calculate to 20000 pulses recognize the system has moved 5000 μm.
Within this lead the parameter setting is encoder resolution to 5000 and feed lead as 5000. If the encoder provides 4 times 5000 line/round, the parameter must be set: encoder resolution is 1250 and feed pitch is 5000. CNC controller will calculate 5000 pulses as the machine has moved 5000 μm.
Encoder Resolution
When optical scaler is place upon the axis as direct feedback element, the optical scaler accordance to its spec cause 1 pulse become the 1 movement unit. For example: optical scaler model is 5 μm, meaning whenever there is a 5 μm movement, it will cause 1 pulse. Using optical scaler, the parameter of the gear must be set to 1:1, if the gear setting is otherwise the optical scaler will lose its usage capability. Use the optical scaler to calculate the resolution of the virtual encoder.
For example: Optical scaler is 1 μm, assuming the feed pitch is 5000 μm, 5000 μm/1 μm/4 = 1250, thus, within the axis parameter the resolution of the encoder is set to 1250.
Note: the value "4" within the calculation means 4 times.